Эта заметка будет посвящена описанию конструкции и одному тестовому полёту на многоразовой (ну по большей части) ракете.
Список модов (краткий): AIES Aerospace, B9 Aerospace, Deadly Reentry, Ferram Aerospace Research, KW Rocketry, MechJeb 2, Modular Fuel Tanks (с активным
RealFuels), а также многие другие модификации, детали из которых не задействованы.
Сначала немного предыстории. В один день мне показалась интересной идея о постройке собственного шаттла (впрочем куда более упрощённого). Изначальной идеей было создание лёгкого шаттла, с максимально простой и симметричной системой подъёма, способного доставить 5-тонный спутник на геостационарную орбиту. Названо это всё было RSL G1 Mk.1 (Reusable Space Launcher первого поколения (планируются и более совершенные модели) версия 1).

Впрочем эта идея не увенчалась успехом. Созданная мной каракатица самостоятельно взлетать с полосы отказалась, а создавать отдельное «устройство» для подьёма на высоту (будь то тяжёлый самолёт, ака испытания бурана, или небольшую ракету) я счёл нецелесообразным (невозможность отрыва от земли уже указывала на то, что летать оно будет плохо).
В какой-то момент я решил обрубить все крылья и оставить просто спускающийся на парашютах центральный блок (а заодно и сделать его роботизированным), со всеми двигателями и грузовым отсеком. Название сменилось на соответственно RSL G1 Mk.2.
Относительно быстро этот самый блок был спроектирован:

Это и есть та самая часть, которая (в теории) используется многократно. На ней установлен маршевый двигатель для выведения на орбиту, питающийся от окислителя и жидкого водорода, 3 маневровых двигателя (при помощи октагональных стратов, установленные внутри маршевого двигателя) для достижения геостационарной орбиты и сам грузовой отсек.

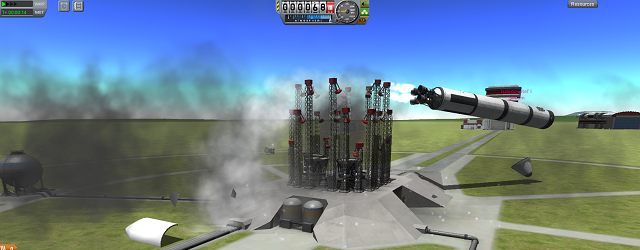
Не заняла много времени и установка вокруг центра топливных баков для маршевого двигателя:
, затем, после отстрела первой пары, топливо идёт из второй. Такая схема более эффективна чем одновременное использование всех 4 блоков.")
Из-за очень низкой массы жидкого водорода 8 «морковок» питают один маршевый двигатель (к тому же, на бумаге, такое топливо даёт самый высокий isp). TWR оказался ниже 1, и поэтому, после нескольких примерок, я решил установить два твердотопливных мотора Globe X-2. Они были снабжены парашютами, а также по одному сепаратрону для безопасного отделения их от конструкции.
По описанию это всё стало походить на Спэйс Шаттл (маршевый двигатель, питающийся от жидкого водорода, два твердотопливника, спускающиеся на парашютах, вынос спутника на геостационарную орбиту, и т.д), однако внешне это было совсем не так

Не смотря на внушительный внешний вид, выносить эта система может лишь 6.5 т (правда на геостационарную).
На многих моих ракетах отказывается летать даже мехджеб, особенно это относится к сверхтяжёлым ракетам-носителям(пример такого запуска в оглавлении). Однако эта система оказалась вполне нормально управляемой.
Выход на орбиту был совершён полностью за счёт маршевого двигателя, как и планировалось, маневровые лишь довершают последнюю сотню dV. На орбите последняя пара «морковок» отстреливается (вместе с носовым обтекателем, прикрывавшем тепловой щит), после этого маршевый двигатель висит мёртвым грузом до самой посадки. Стандартного топлива (окислитель+жидкое топливо, на котором работают маневровые двигатели) хватило ровно для выхода на геостационарную орбиту, сброса спутника и снижения перигея до 34км (заснять это дело я тогда не догадался, а делать новый вылет уже не охота).
После атмосферного торможения апогей упал до 50км (внутри атмосферы). Спустя некоторое время началось вхождение в атмосферу.

Большая кинетическая энергия (весит эта груда металла немало) была погашена атмосферой.
Больше всего проблем произошло именно в при посадке.

Слишком поздно выпущенные парашюты не смогли достаточно затормозить конструкцию до открытия куполов, на момент перегрузки составили более 15g (впрочем сломалась лишь пара стратов).
Самих парашутов тоже оказалось недостаточно, скорость снижения была 7,5 м/с, и, очень некстати, над склоном горы. Маршевый двигатель гордо выдержал удар, но тут уже подвёл склон: вся конструкция завалилась на бок.

Что ж, первый вылет вышел не совсем многоразовым.
Спасибо Andre за помощь.
Я мог бы выложить крафт-файл, но однако у меня стоит (относительно) специфичная сборка модов (которые я, к тому же, самостоятельно редактирую), да и вряд ли кому-либо нужен лаунчер с такой невысокой полезной нагрузкой при больших проблемах.

17 комментариев
Если я правильно помню, нерва это атомник(причём стоковый), гибридный двигатель из B9 — SABRE. К тому же это принесло бы больше проблем в виде слежения за показателями воздухозаборников, нужно было бы изменить пропорцию топлива в баках(больше жидкого толива). В общем это не стоит усилий. Да и я сомневаюсь что эти двигатели поддерживают другую смесь топлива(они не настолько гидбридные).
Кажется, я слишком развёрнуто ответил…
А по теме — четыре блока двойных Джамбо = оверкил, для поднятия 5т на орбиту. И TWR в районе 1.15 — довольно затратно по ресурсам. Нижнюю часть атмосферы Кербина лучше всего преодолевать при TWR = ~2.
Это же жидкий водород, очень лёгкий, поэтому и 8 баков (Вы ещё не видели мой разгонный блок до Джула, для нагрузок под 70т.). В твёрдых слоях атмосферы я стараюсь не разгонятся выше 200мм/с(с FAR, на более высоких скоростях, начинаются проблемы). Вообще, первые 12км я преодолеваю на черепашьей скорости, постепенно снижая тягу.
Но 173… это перебор ;)
Если говорить прямо, то все баки с жидким водородом поднимают 45, а не 5 т. на НОО(разница уже в 9 раз). А затем, 8 т. двигателя(а так же прочей, малонужной шешуры) висят мёртвым грузом на системе. Так что, можно сказать, что оно доставляет на геостационарную орбиту все 15т.
И это… я так понимаю, данный экземпляр не предназначен для ингейм дозаправки через стыковку с заправщиком на поверхности, по приземлению?
Разумеется, изначально это не предполагалось. В теории, это всё можно сделать. Боковые баки крепить на стыковочные порты, усилять квантовыми стратами, подвозить их (а заодно и груз) на тяжёлых грузовиках(с KAS). Это, конечно, реализуемо, но, имхо, достаточно сложно.
Чего только стоит обслуживание маршевых двигателей после каждого полета. Каждый двигатель демонтировался, разбирался, проходил ТО и после этого — контрольные огневые испытания. Похожее обслуживание выполнялось и для тепловой защиты, а это, на минутку, больше 10к пластинок. И каждую нужно осмотреть и в случае необходимости — заменить.
В изначальном проекте экономическая целесообразность просчитывалась для полетов шаттлов каждых 2-3 месяца с ресурсом в 100 полетов для каждого корабля при условии повторного использования твердотопливных ускорителей. Реально 100 полетов набралось за 20 лет и на весь флот. И ускорители хотя и эвакуировались, но повторно (если не ошибаюсь) не использовались.
Примерно так же экономически оправданной будет городская маршрутка, которую после каждого рейса ставят на прикол на неделю, снимают движки, перебирают подвеску и т.п.
В этом смысле Скайлон с его ориентацией на беспилотный режим и возможность эксплуатации с минимальным ТО сразу же выглядит привлекательнее, даже без учета топливной эффективности.
Что касается заявленной здесь грузоподъемности «5-7т на LKO», то это достаточно легко достижимо при использовании 2-3 фазовой гибридной схемы, при этом система доставки получается 100% многоразовой, т.е. не использующей одноразовых деталей. Причем без использования модных деталей.
Вариант с вертикальным взлетом успешно продемонстрировал Скотт Мэнли, вариант с горизонтальным взлетом могу продемонстрировать я, если на то будет желание у достопочтенной публики.
Впрочем, с одним я поспорить не могу. Ваша ракета — секси.
Не самые высокие характеристики обусловлены изначальной постановкой вопроса: установка всех двигателей на центральном, возвращаемом блоке, маршевый двигатель, питающийся от одноразовых подвесный баков с жидким водородом. Т.е. требовалось как можно меньше ступеней как таковых при, по возможности, наибольшей пользы с них(маршевый двигатель таки справляется с выходом на НОО). Ну а очень уж гибридные ракеты (с турбореактивными двигателями) я не слишком люблю. Максимум — сэйбр энжины на SSTO.
Да и я, как правило, ставлю внешний вид и, так сказать, «звучность» выше, нежели характеристики.