
Не сбавляя оборотов, переходим к четвертому эпизоду повествования о деятельности Бюро Аэрокосмических Исследований (ARB).
Напомню, что Бюро живет одной жизнью, без сохранений, загрузок, откатов
Следующим в списке на орбитальную прогулку у нас был картографический спутник. Несуразный, простенький… Мелкоразмерных деталей пока еще почти нет, поэтому будем довольствоваться тем, что есть.
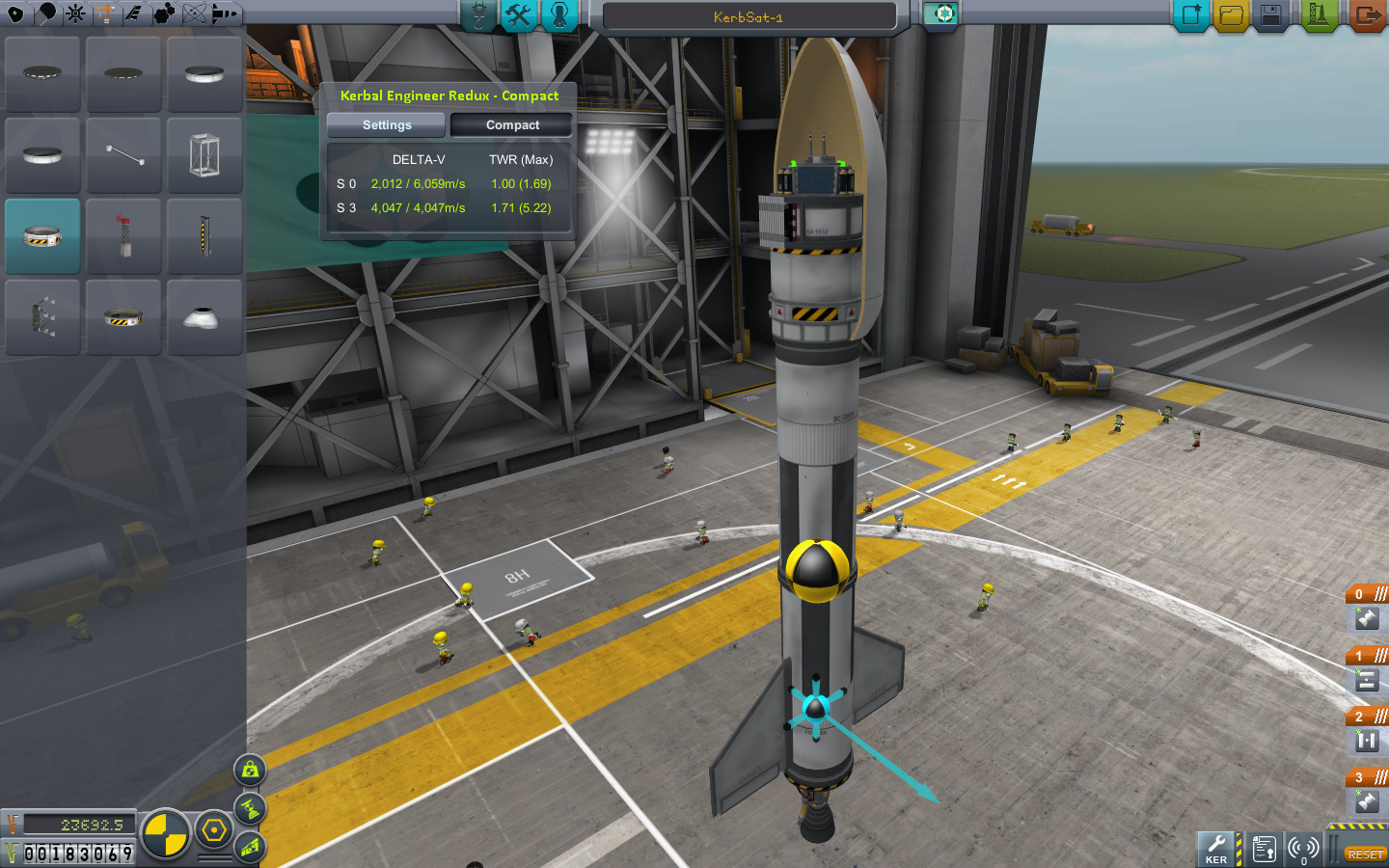
Малюсенькая ракета, казалось бы. А стоит 23.600. На две с половиной тысячи больше, чем обошелся Бюро управляемый полет в предыдущей заметке. Сам спутник, что сверху, несет два инструмента для картографии — радар (довольно слабенький), и мультиспектральные сенсоры для разметки биомов и поиска аномалий. Полетели?


Едва ли. Опять потеря управляемости при взлете. Запуск провален, ракета-носитель упала неподалеку от KSC и разлетелась на куски.
Ладно, попробуем еще раз,
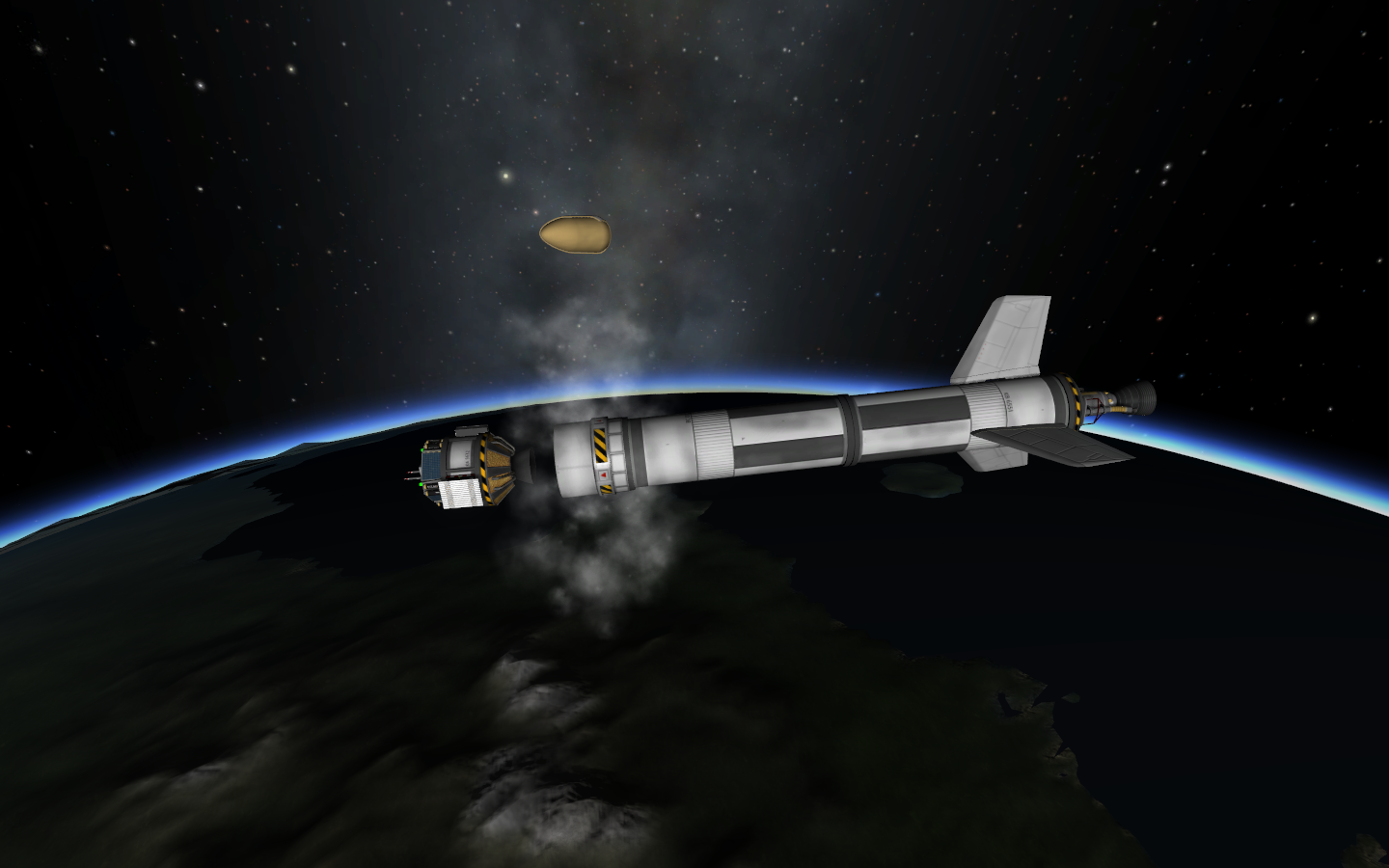
В этот раз запуск прошел без каких-либо проблем. Взят курс на север, для выхода на полярную орбиту. Высота продиктована оптимальными дальностями работы картографических инструментов — 250 км.
Всяческой информации интерфейс картографического модуля предоставляет навалом. Даже апогей/перигей (включая прогнозируемые после маневра!) и маневровые ноды видны. Интересно. Но, пока что, это все лишнее. Надо начать со сканирования поверхности Кербина радаром.
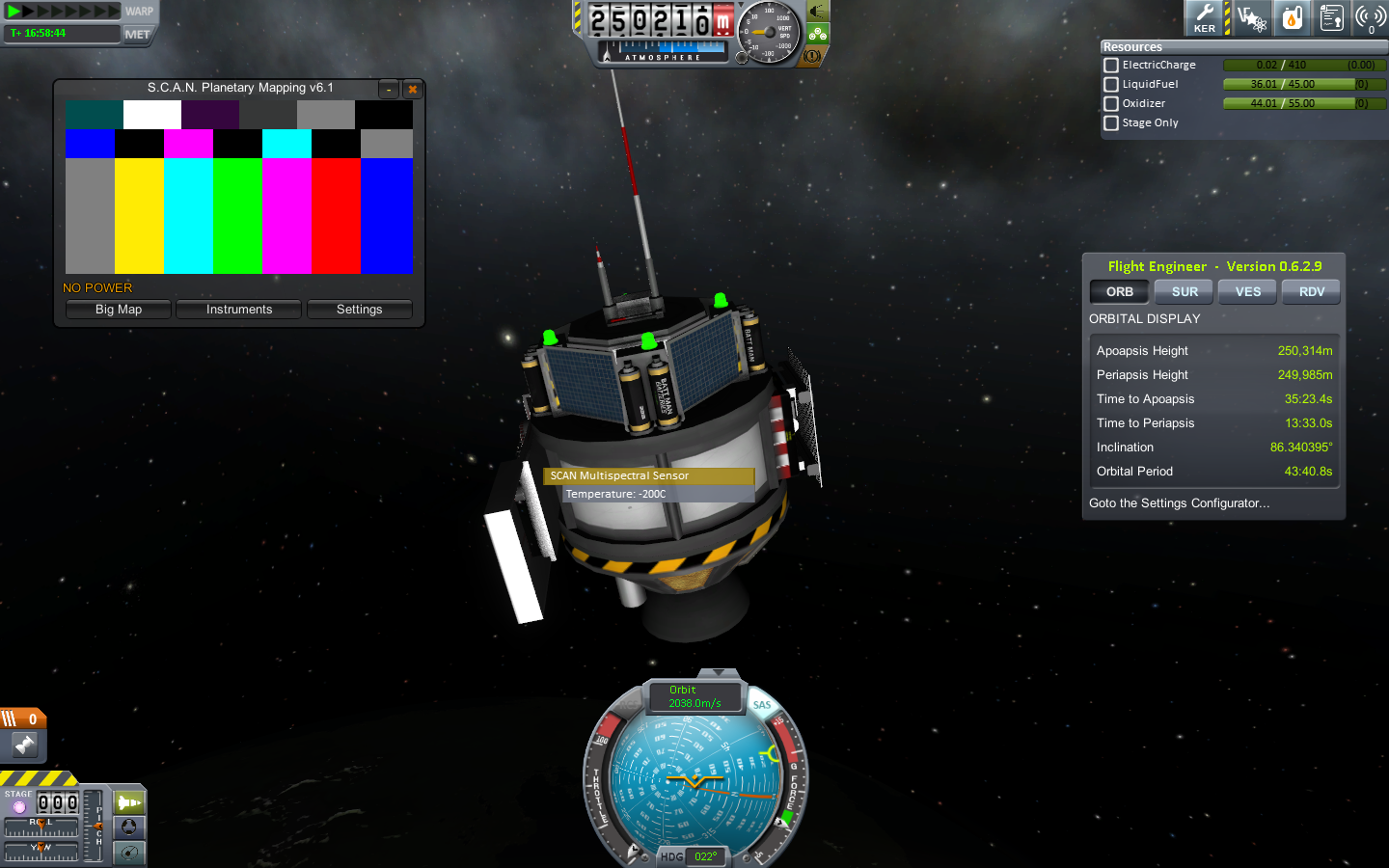
И тут мы наталкиваемся на очередную проблему. Солнечные панели не могут потянуть запросы всех активных систем, одновременно включенных на полную катушку. Пришлось отключить мультиспектральные сенсоры, и ограничиться работой картографического радара.
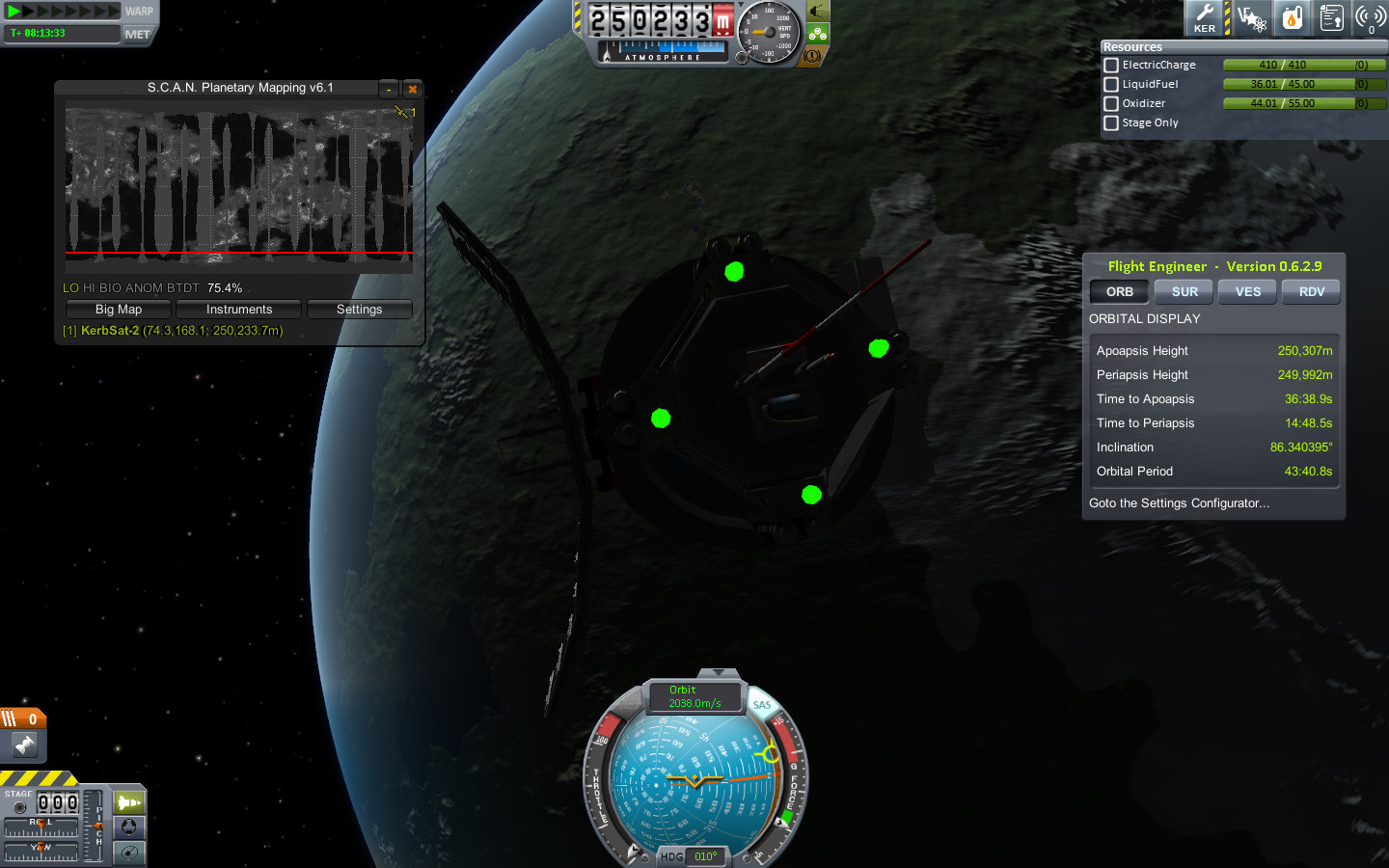
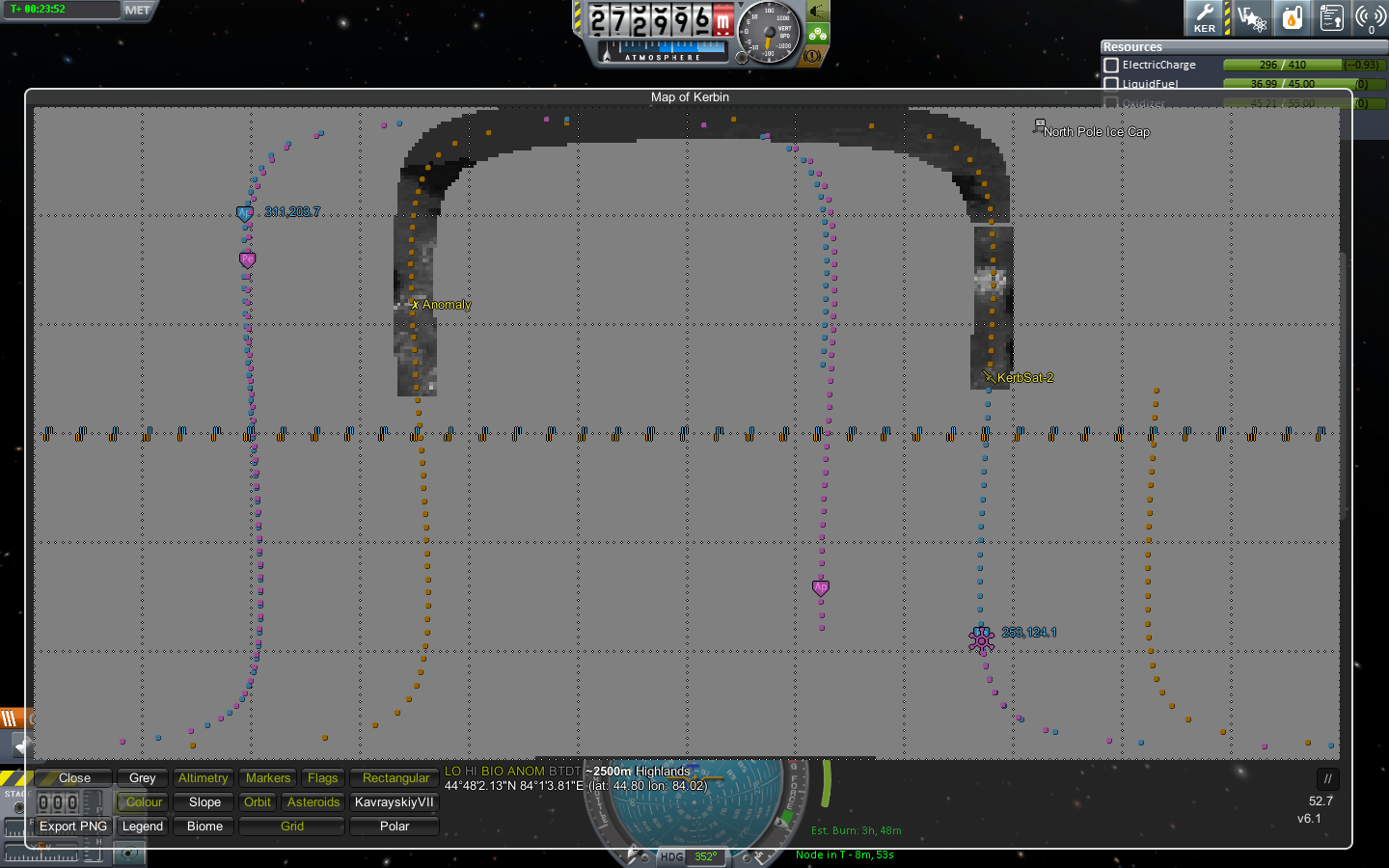
Забавно выходит. Если низкое разрешение полученных данных вполне очевидный момент, то цвет… Карта хоть и составляется радаром, но все-равно представлена в черно-белом виде. Ну да ладно.

Аж целые 10 очков науки за составление карты высот Кербина в низком разрешении. Зато, их можно без каких-либо потерь передать по радио. А вот включение модуля с мультиспектральными сенсорами, даже если выключить все остальное, выводит энергосистему спутника в ноль. Так что, увы, карту биомов мы составить не сможем. В другой раз, когда будут солнечные панели помощней.
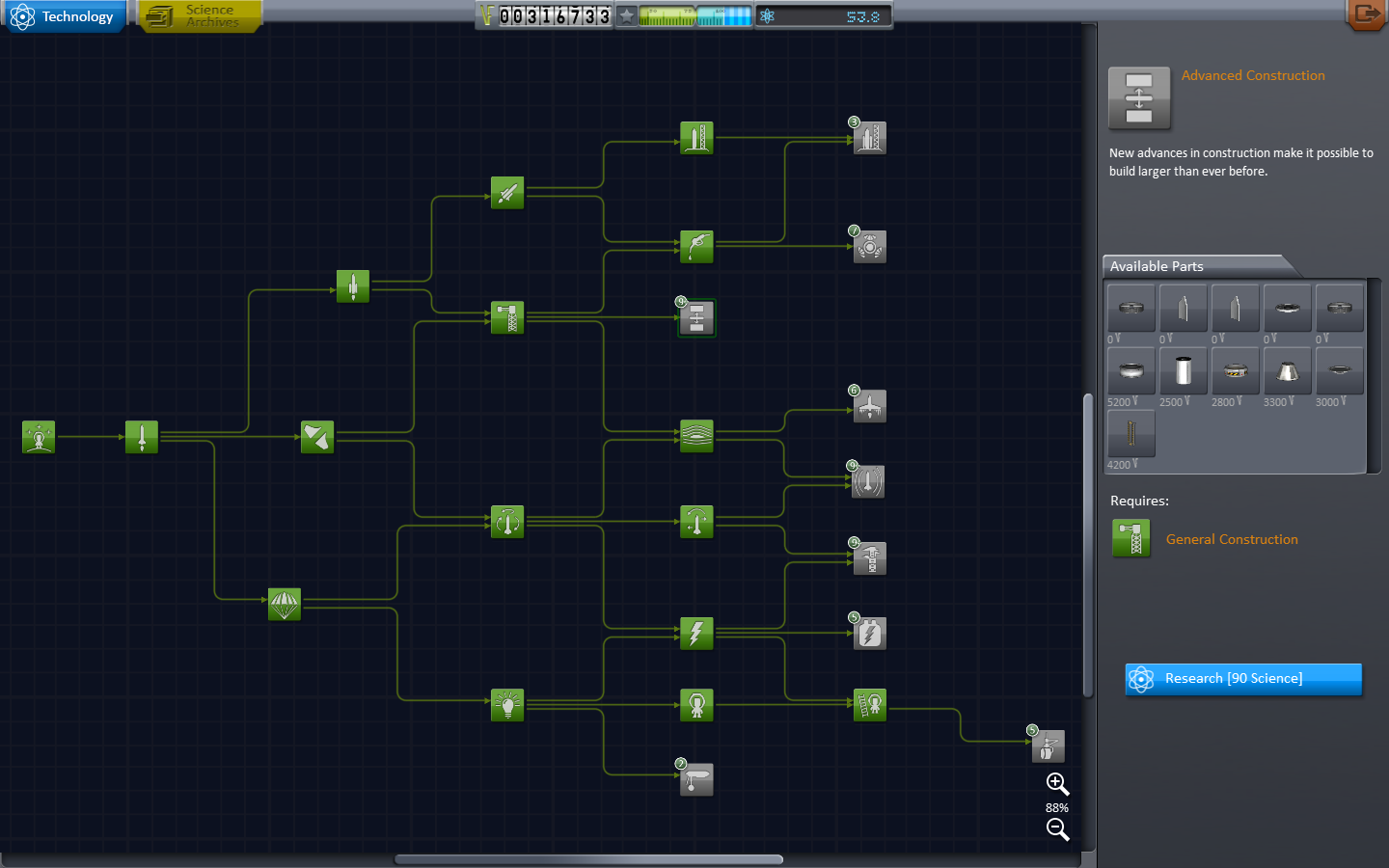
Отдел R&D смог нас порадовать двумя приятными новинками — мини-двигателем и топливными шлангами. Пораскинув мозгами, ваш непокорный слуга решает следующее: пора завершить выполнение контракта на разведку Муна. И новый мини-двигатель в этом нам поможет. Готовим беспилотный лендер :)

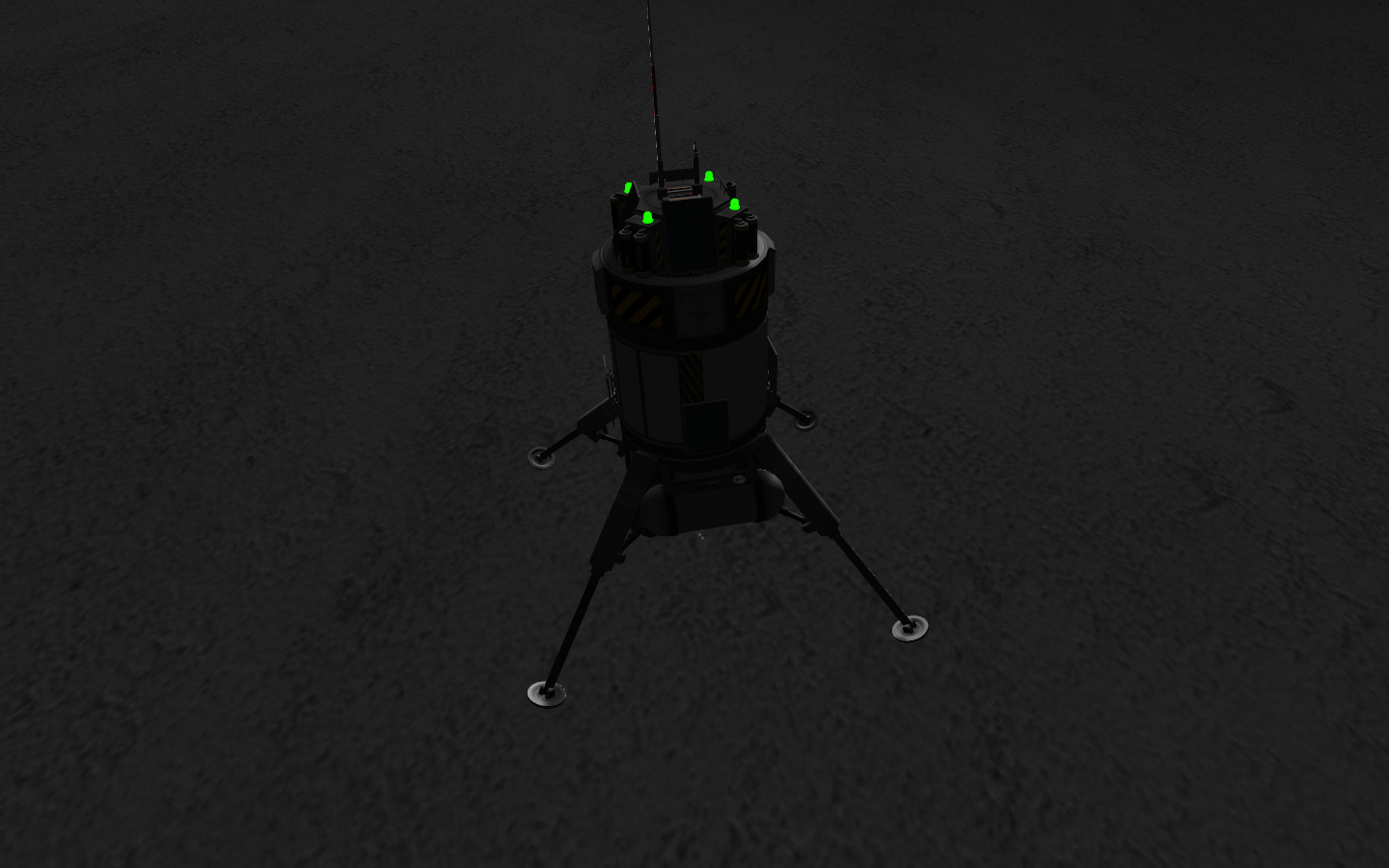
Посадочные ноги расставлены достаточно широко, а центр массы посажен низко, что в сумме должно дать хорошую стабильность при посадке. Несмотря на размеры двигателя, TWR лендера довольно высок, что есть тоже плюс — с низким TWR можно «не угадать» с первого раза по темпам снижения скорости, даже при максимальной тяге.
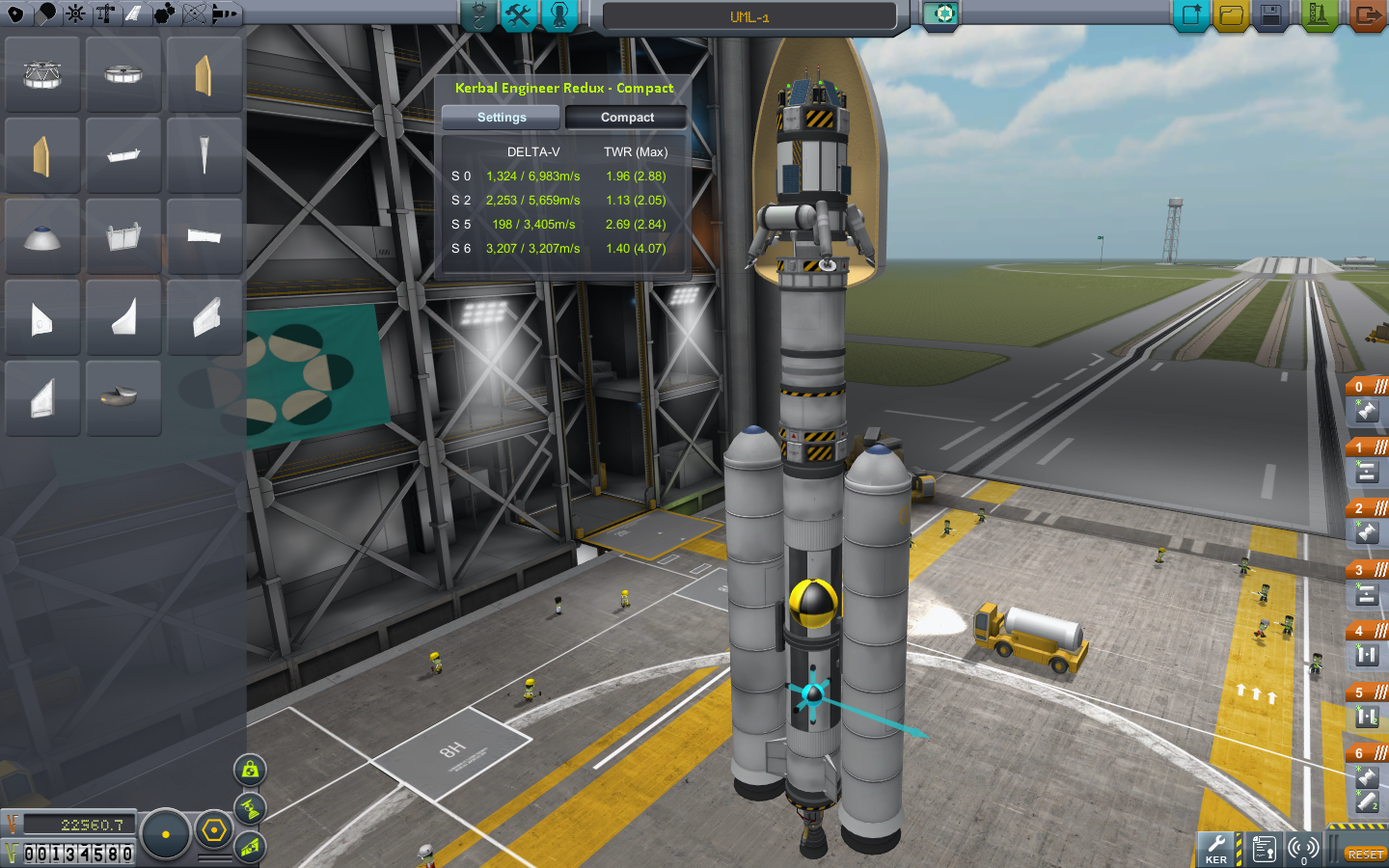
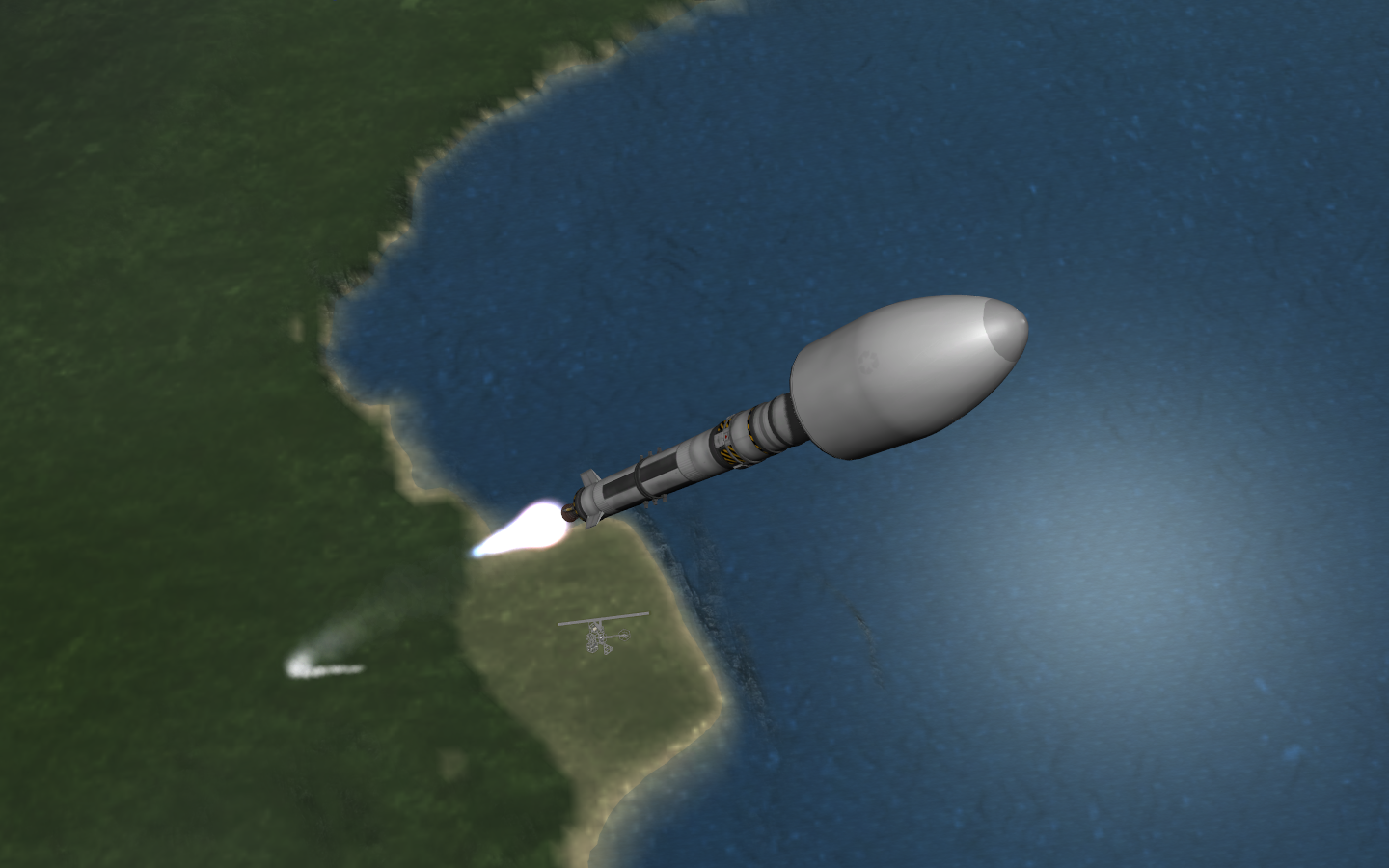
А вот и уже привычный дизайн малотоннажной ракеты-носителя с твердотопливными бустерами. Аэродинамические стабилизаторы поставлены поменьше, потому что большие авиационные выглядят как-то ну уж совсем не к месту.
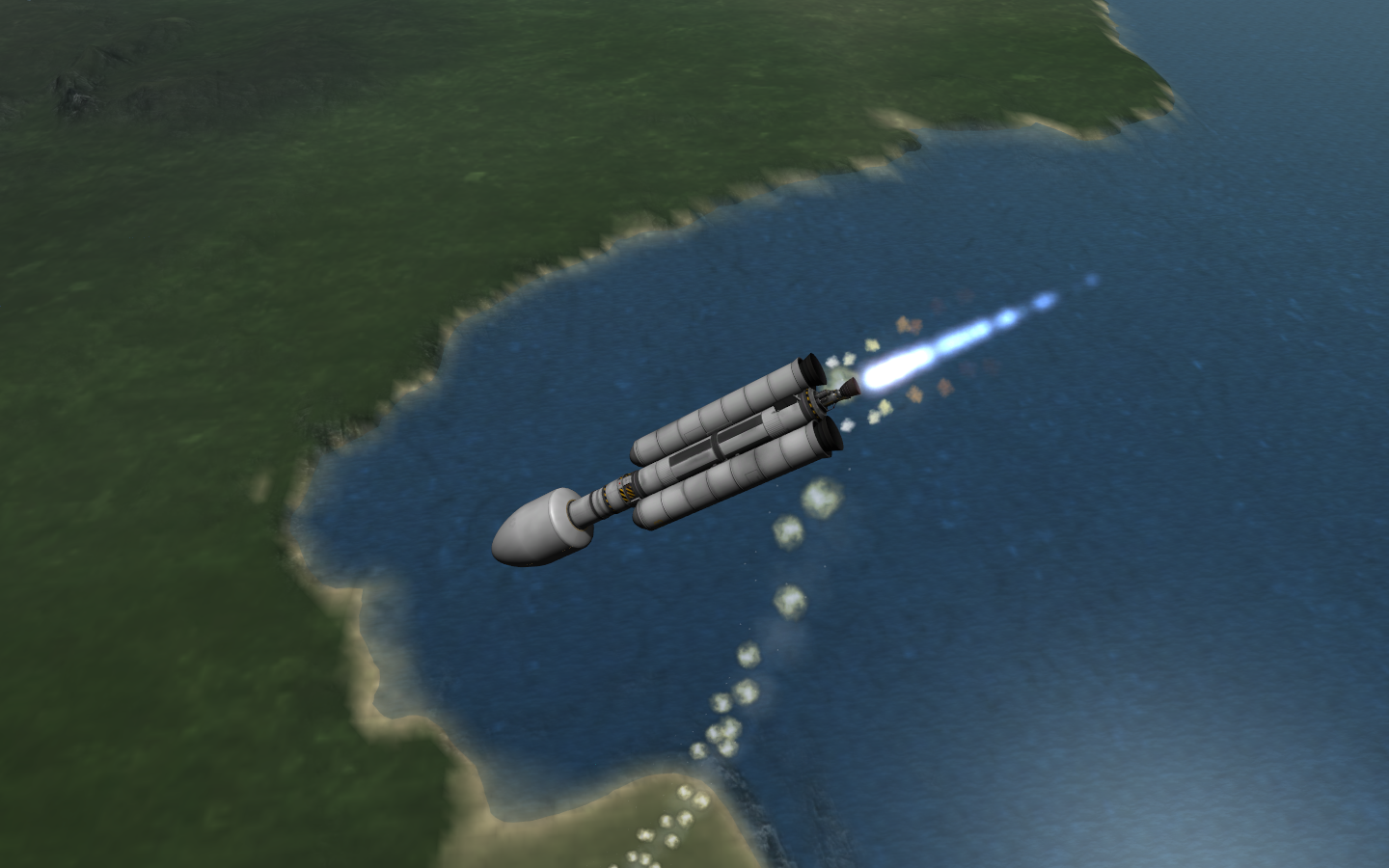
Но, вы уже это видели, да. В споре между эстетикой и аэродинамикой безоговорочно побеждает вторая. Обидно. Давайте пытаться выйти из положения! После отстрела бустеров удалось восстановить управление и продолжить полет. А как же дельта? Потрачено впустую на смертельную борьбу было довольно много, и, черт его знает, получится ли до орбиты хотя бы дотянуть.
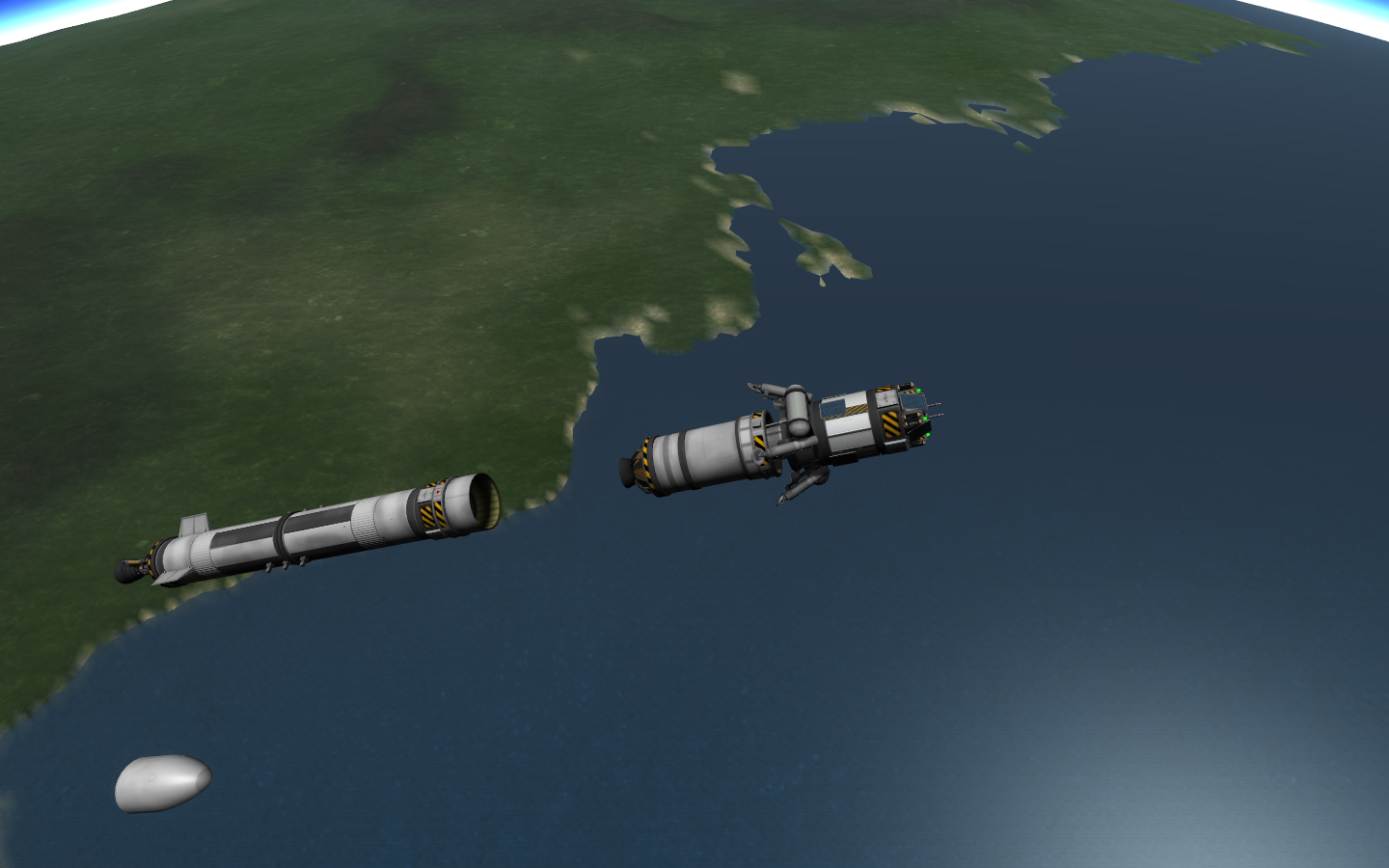

И… получилось. Все оказалось не настолько плохо. Запаса хода (дельты скорости) осталось не так уж и много, но есть смысл попробовать продолжить идти по намеченному маршруту. Ну, с небольшими коррекциями.

Будем вспоминать на ходу, как учил экономней всего садиться Скотт Мэнли. Не тратим топливо на циркуляризацию орбиты, и понижаем перигей как можно ниже. В нашем случае — 7.5 километров.
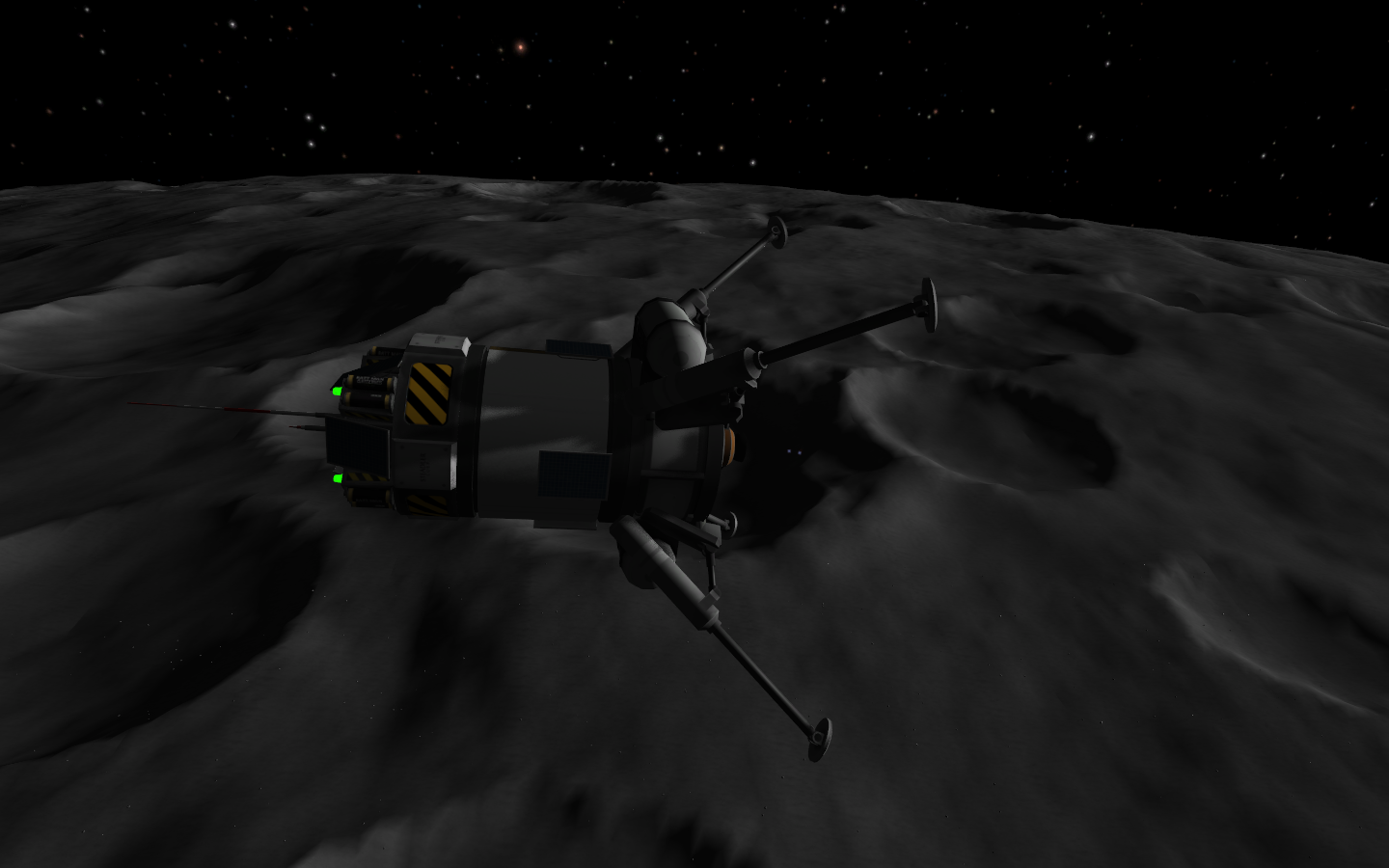
Подойдя ближе к поверхности, начинаем тормозить. Чем ниже, тем более эффективно (меньше борьбы с гравитацией + эффект Оберта). Дельты осталось в районе 400, высота 6км, а нам еще тормозить и тормозить.
Впереди по курсу — опасность. Кратер. Перелететь его, или сесть ровно в центре (если там вообще ровно) — вряд ли удастся. А садиться на склоне — явный провал, перевернемся. Решение — максимально гасить горизонтальную скорость и садиться чуть не долетая до кратера.

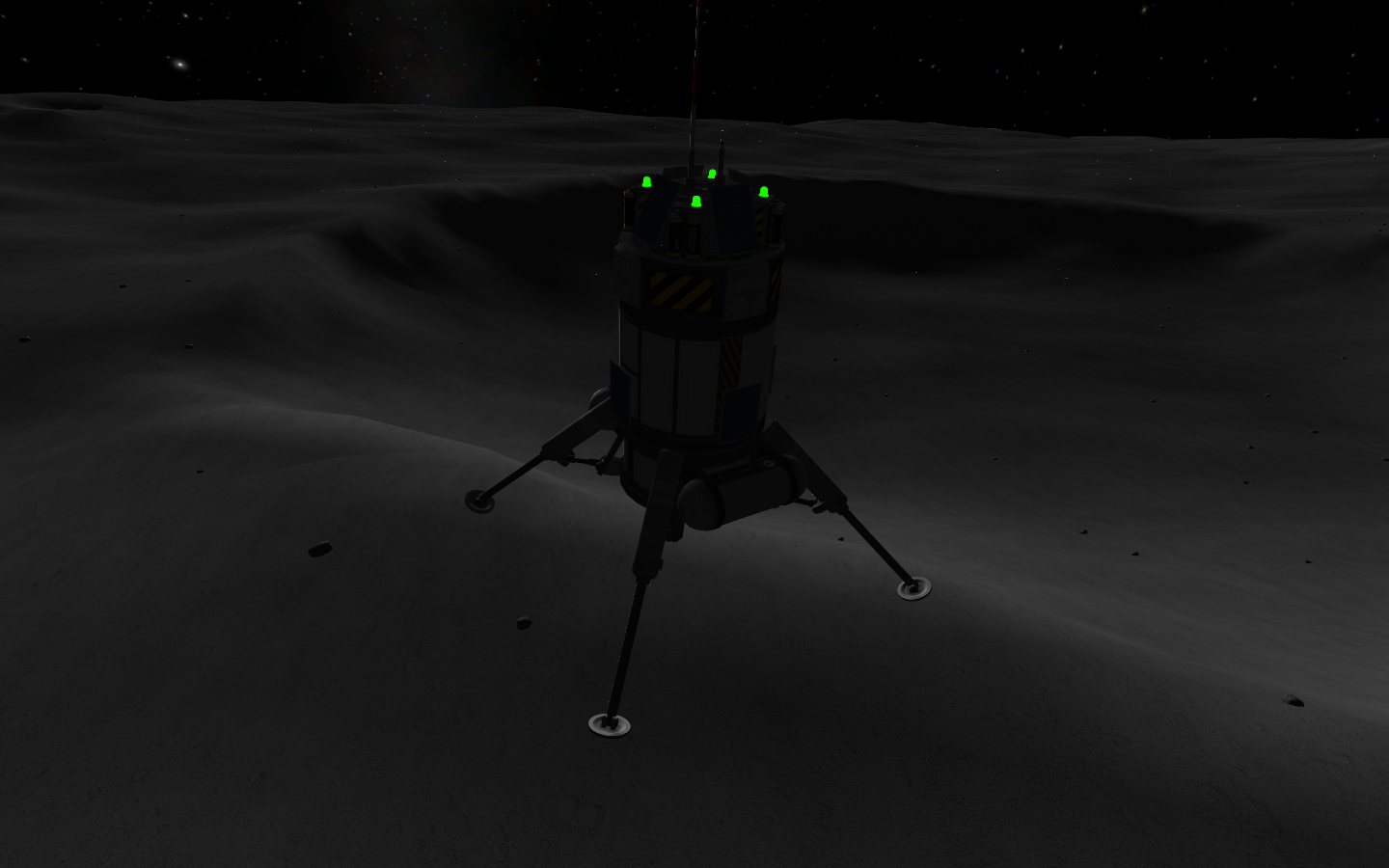
Есть посадка! Тяга в ноль, перекрываем подачу топлива в двигатель. Остаток дельты всего 145 м/с. На грани фола, в общем. Время проводить эксперименты и высылать данные домой.
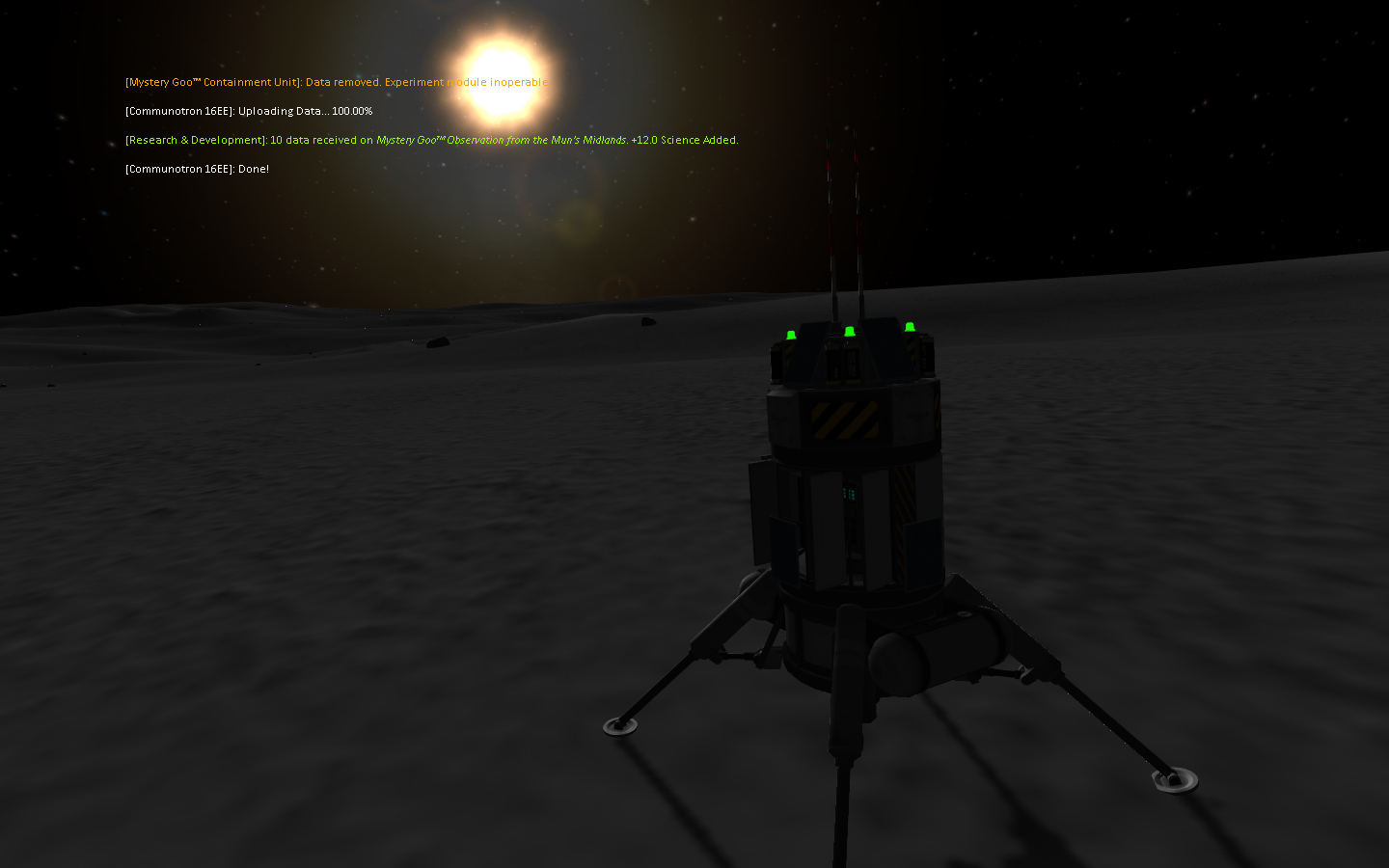


И вот, контракт на разведку Муна — выполнен! После многочисленных фейлов, кувыркании при взлете, которое чуть не привело к полному краху. При минимальной дельте, и сумасшедшей траектории посадки. Осознание того, что в случае катастрофы нельзя загрузиться, и повторить заново — добавило массу приятных ощущений. Поэтому, настоятельно рекомендую всем желающим попробовать такой режим.
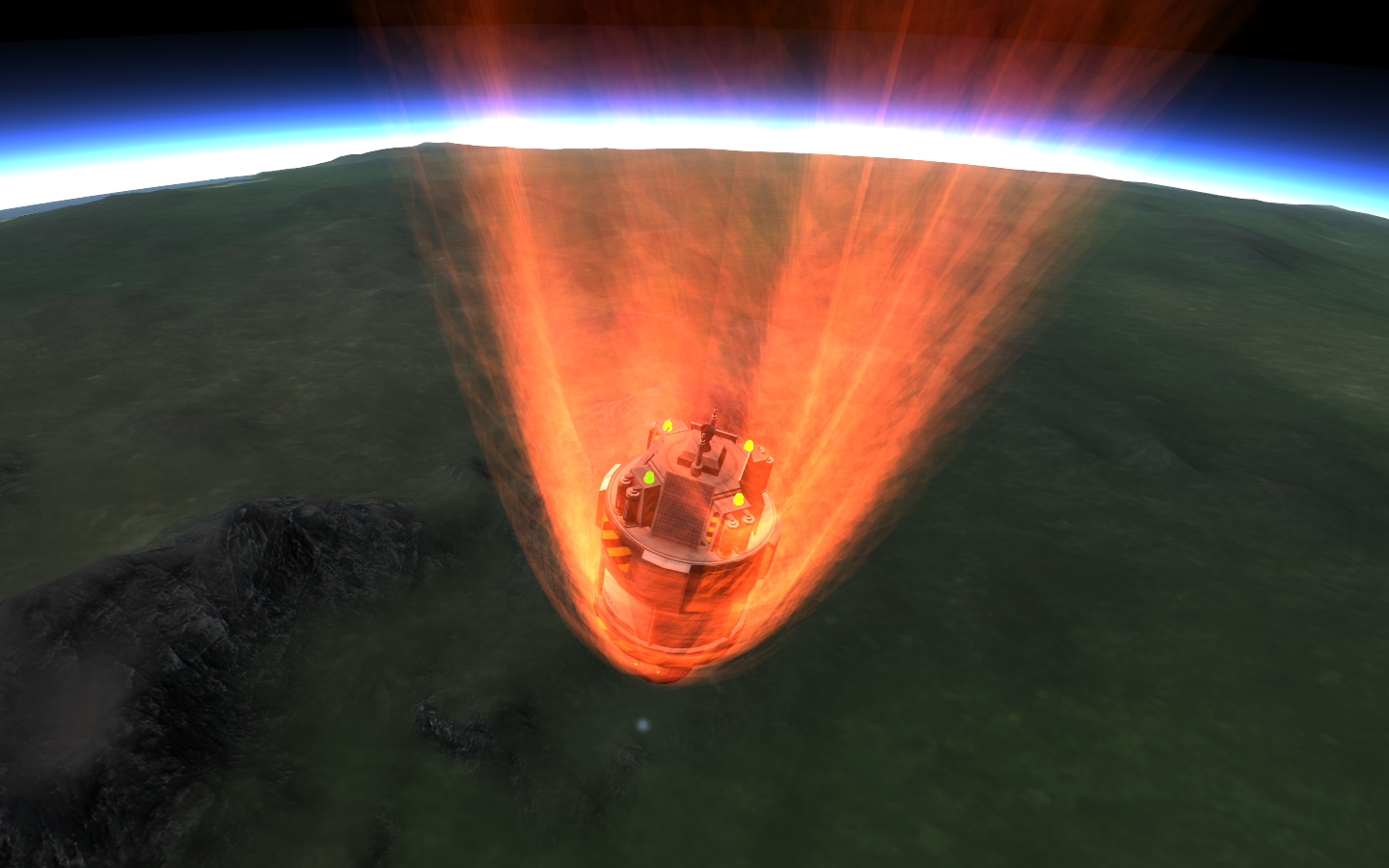
Напоследок, я обнаружил, что отделу R&D нужно еще немножко очков науки для изучения следующей ноды. Здесь мы возвращаемся к контрактам на тестирование деталей. Некоторые из них могут предложить небольшой, но так приходящийся к стати бонус.
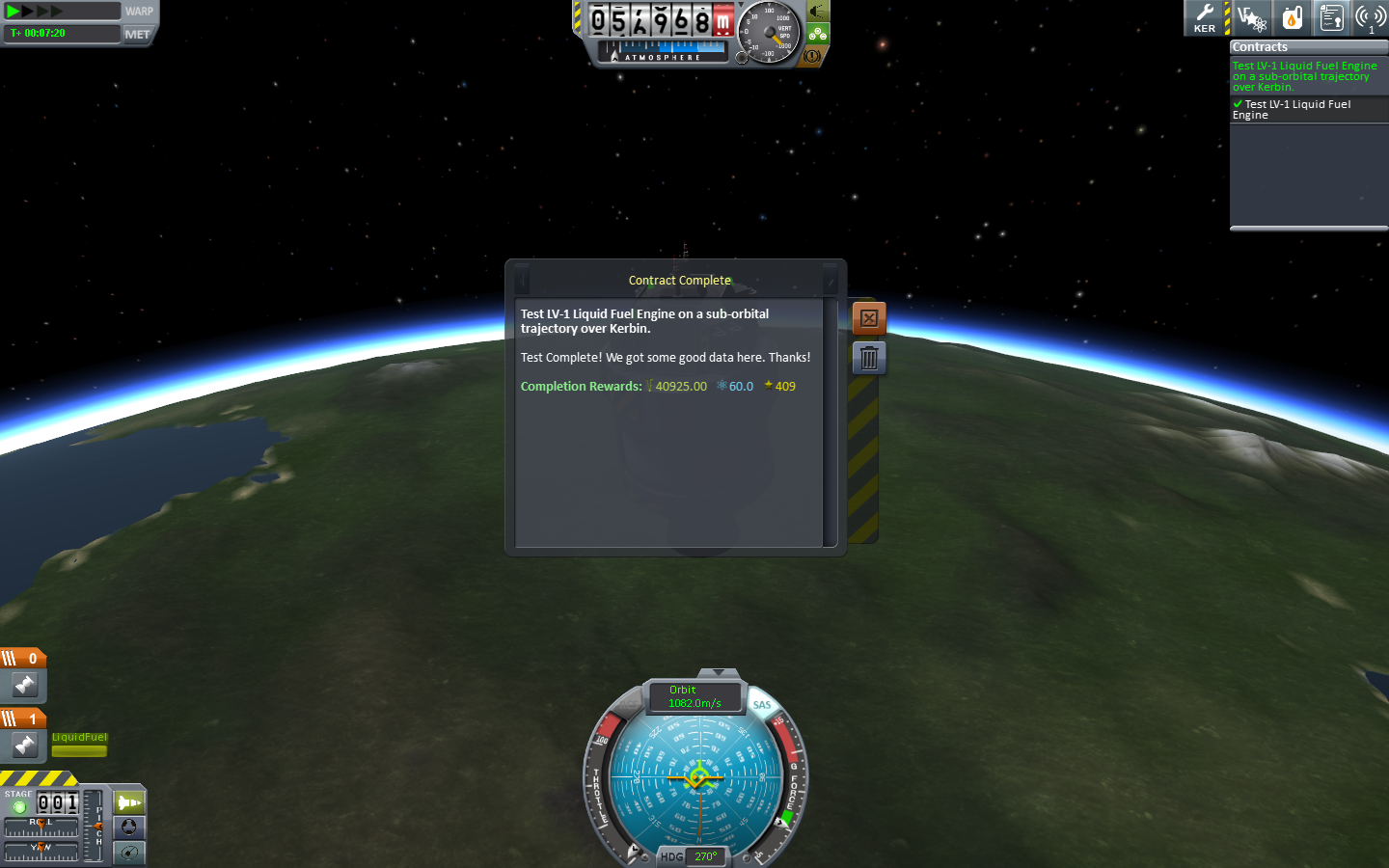
Заодно, я в очередной раз потренировался в управляемой посадке. Даже, без посадочных ног. Успешно :) Чего уж терять, ведь парашюты установить на тестируемый модуль я забыл.
Да уж, управляемая посадка хорошо помогает в выработке адреналина :) И отдел R&D доволен. На этом все, до встречи!
PS: Как обычно, полная галерея тут.

{kind=link}
4 комментария
Я в этом плане всегда стараюсь использовать большой пятиугольный стабилизатор, он в плане грузоподъемности имба (0,7), а весит одинаково с собратьями. Единственнный минус (хотя временами плюс) в том, что как контрольная поверхность он достаточно «тугой» в плане скорости реакции. Но это может быть плюсом в ситуациях с небольшими спутниками, т.к. интенсивная работа SAS часто не стабилизирует, а наоборот раскачивает такие кораблики.
Но если ты рано начинаешь гравитационный поворот, или долго идешь в плотной части атмосферы на хорошей скорости, то часть топлива они тебе сэкономят.
Хотя если подумать, я никогда такие тесты не проводил, может и нет никакой экономии.
Что касается использования аэродинамических стабилизаторов, ты ведь видел последние испытания Кузнечика? У него уже есть рули на верхней части корпуса.
У Союза на первой ступени тоже есть маленьке рули, в дополнение к рулевым камерам двигателя.
Другое дело, что рулевые плоскости в КСП не особенно эффективны на малых скоростях и высотах более 40 км, а большинство проблем с кульбитами как раз там и происходят.
К слову, в NEAR рулевые плоскости работают так же, как в ванилле, т.е. увеличивают эффективность с ростом скорости, или как-то иначе?
Что б я так знал %) Вот что написано на форуме: