После размещения на орбитах Кербина и Минмуса спутников связи мы переходим к следующему этапу. Пришло время разведки и картографирования! Работы ведутся без участия кербонавтов, исключительно радиоуправляемыми аппаратами.
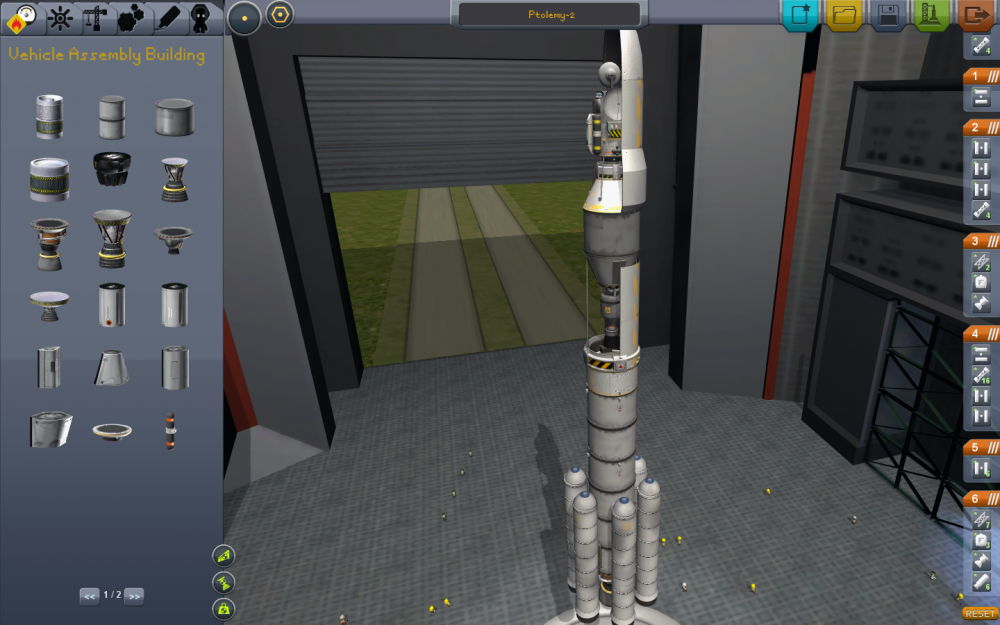
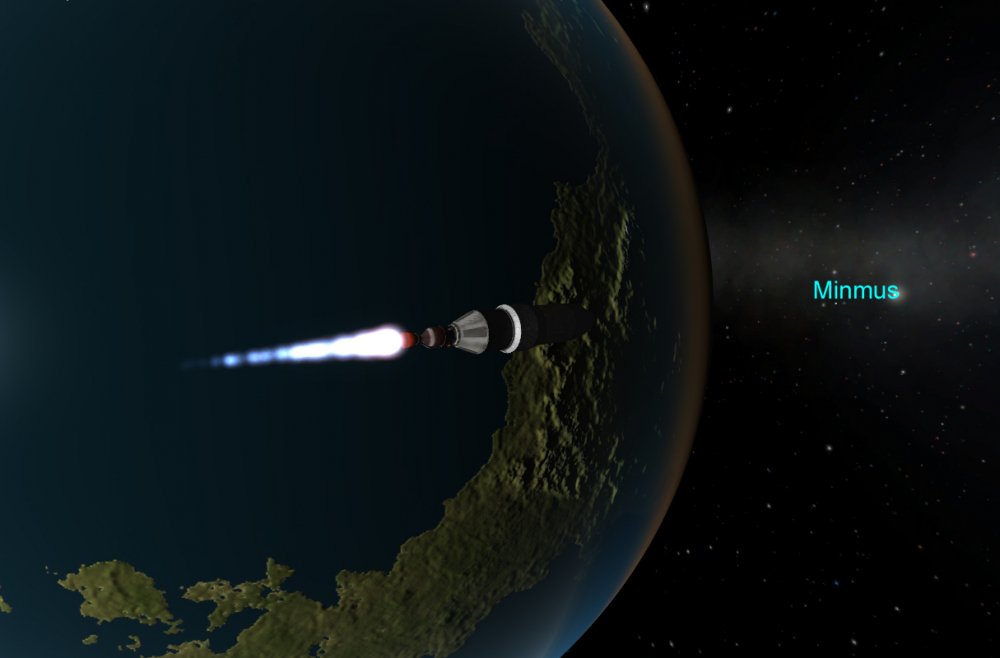
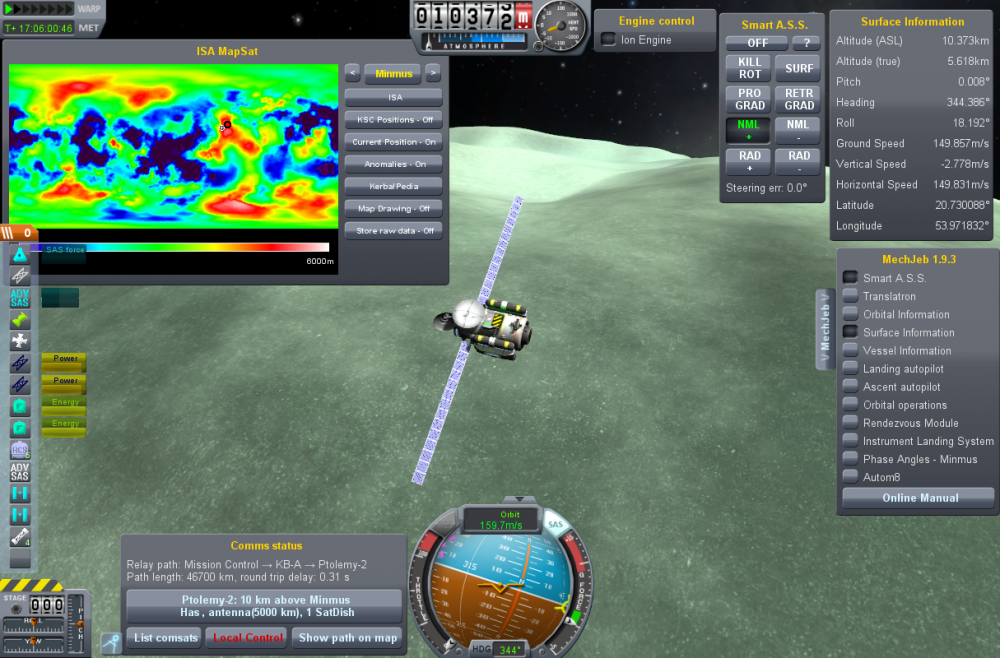
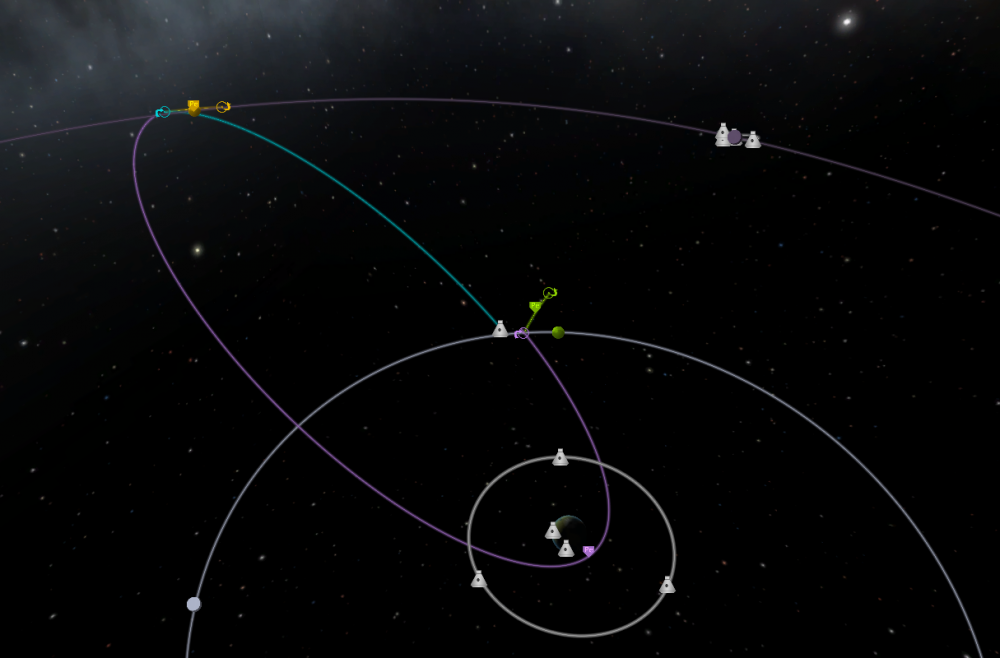
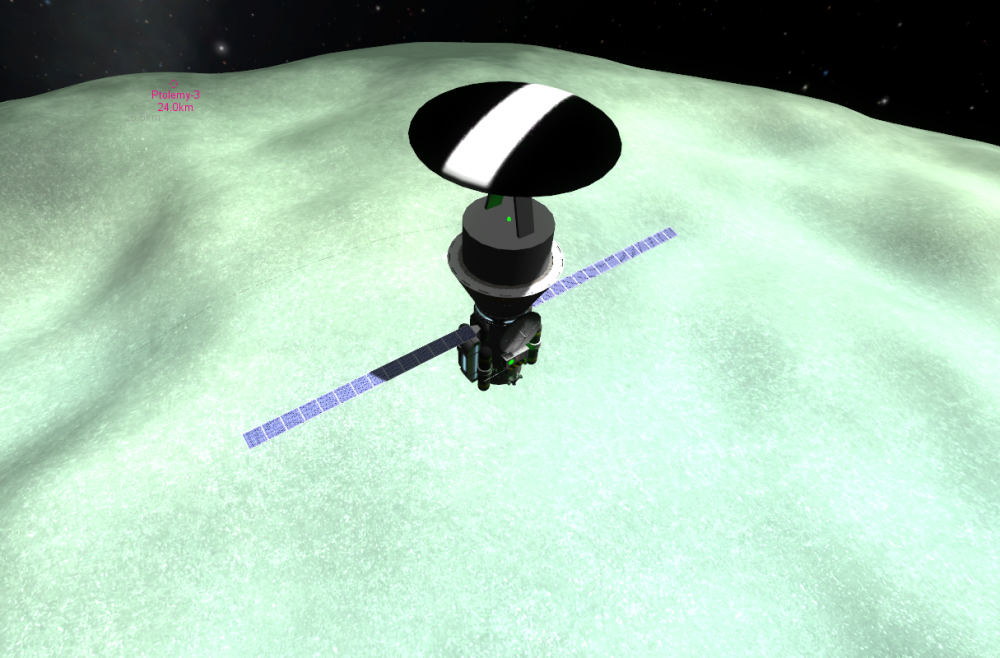
Для картографирования и разведки Лок спроектировал типовой корабль «Птолемей». Ракета-носитель была универсальной, а начинку головной части меняли в зависимости от задач. В процессе выполнения этой фазы в космос отправились три модификации «Птолемея». В разгонном блоке по-прежнему использовали атомный двигатель, как наиболее экономичный. Благодаря отсутствию космонавтов и необходимости везти с собой системы жизнеобеспечения, корабль получился лёгким. Разгон для перелёта к Минмусу с низкой орбиты на одном атомном двигателе занимал около трёх минут.
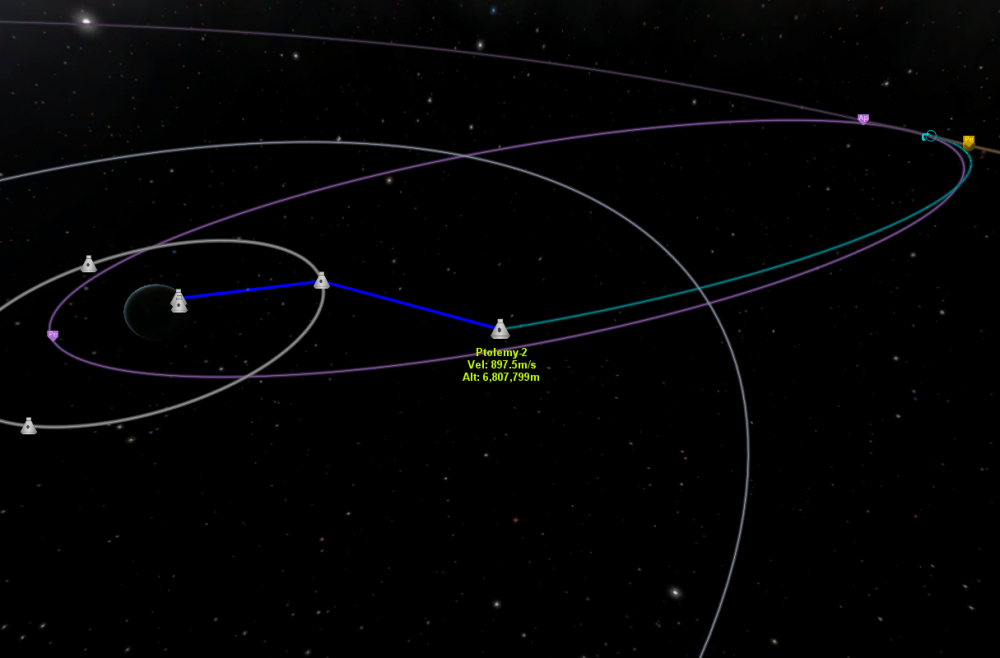
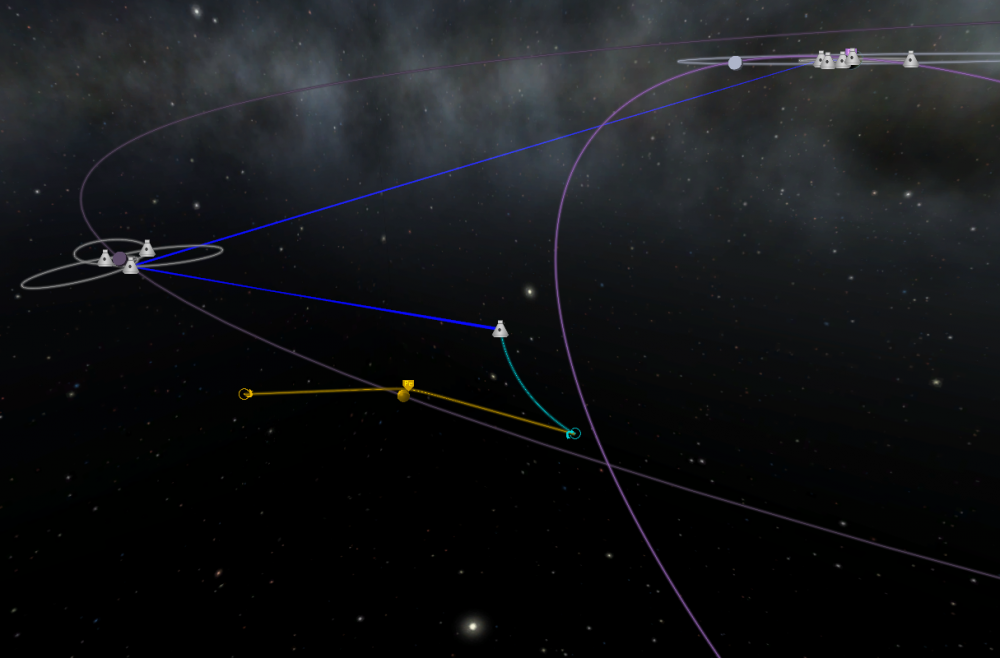
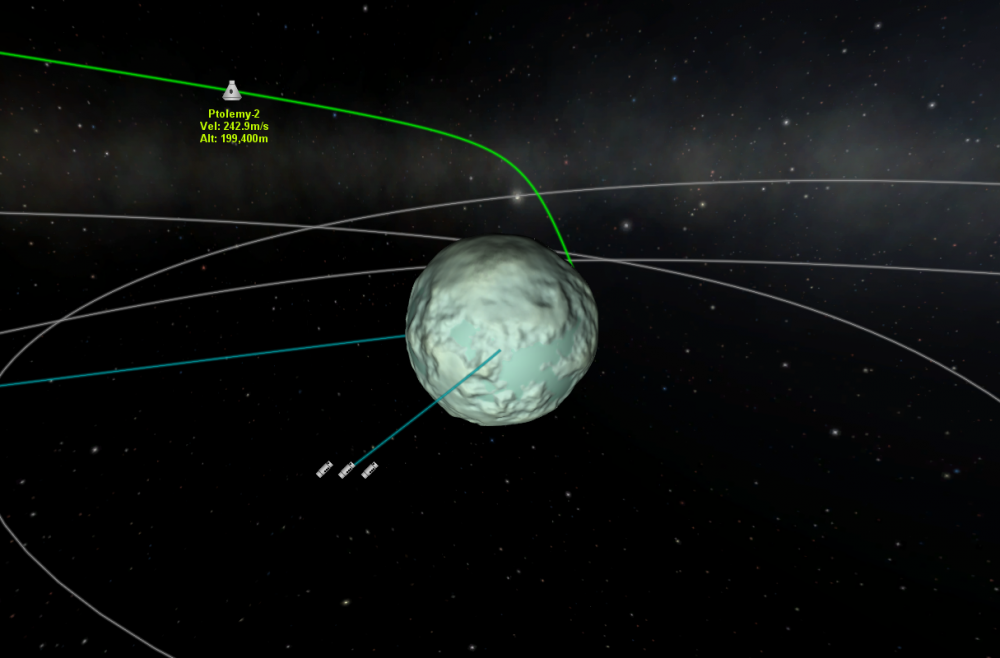
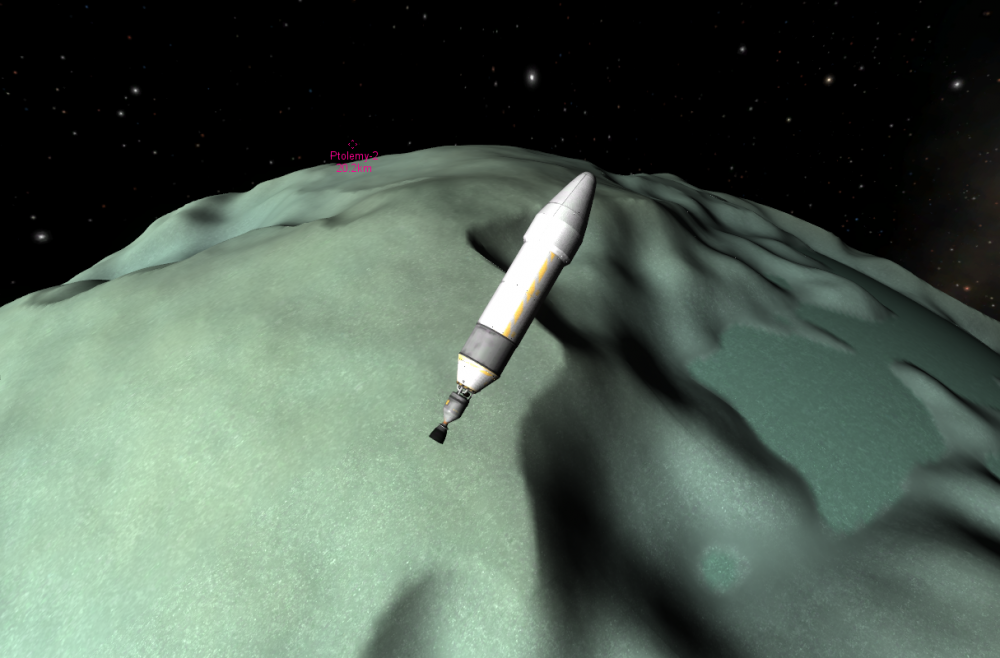
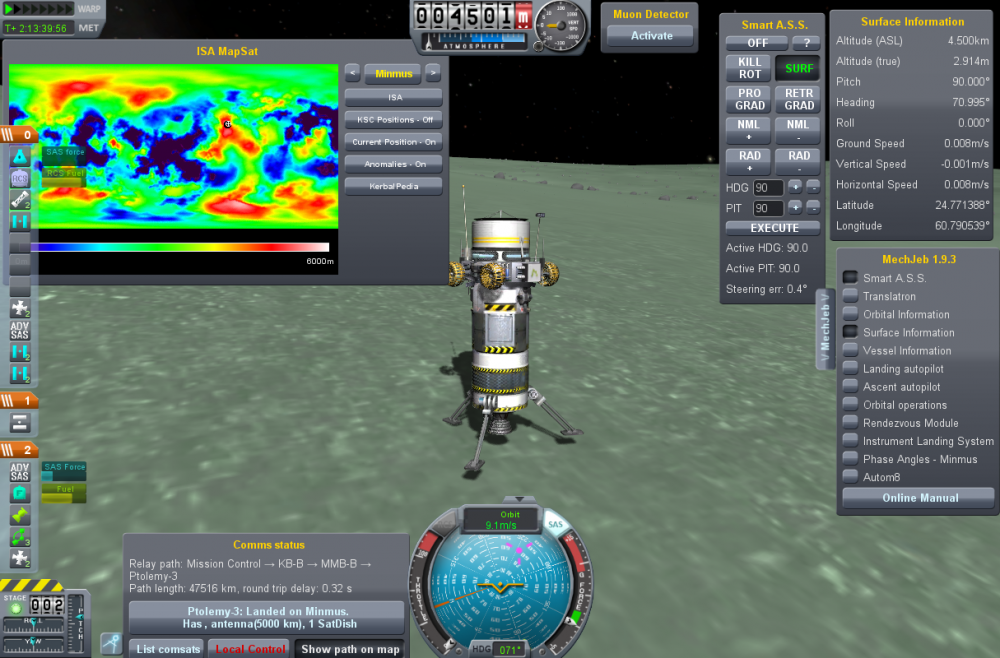
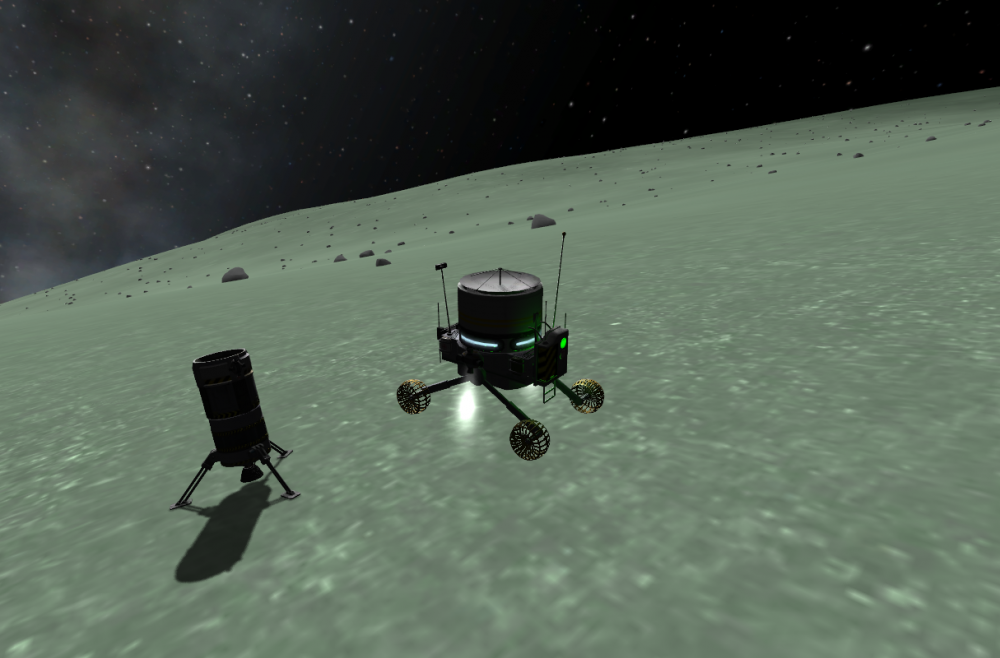
Вместо того, чтобы оставлять разгонные блоки на орбите Минмуса после перелёта, их использовали для получения дополнительной информации о луне. Аналогично реальному проекту Deep Impact, их сбросили на поверхность Минмуса, чтобы вызвать массивные выбросы снега и льда, и удалённо проанализировать их (можно же немного поролеплеить, в самом деле?).
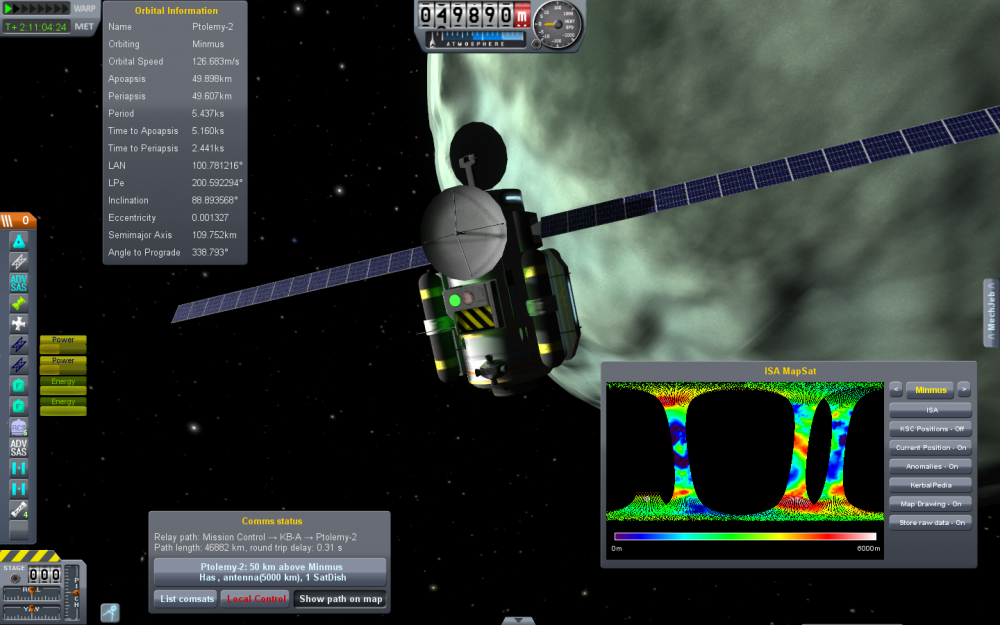
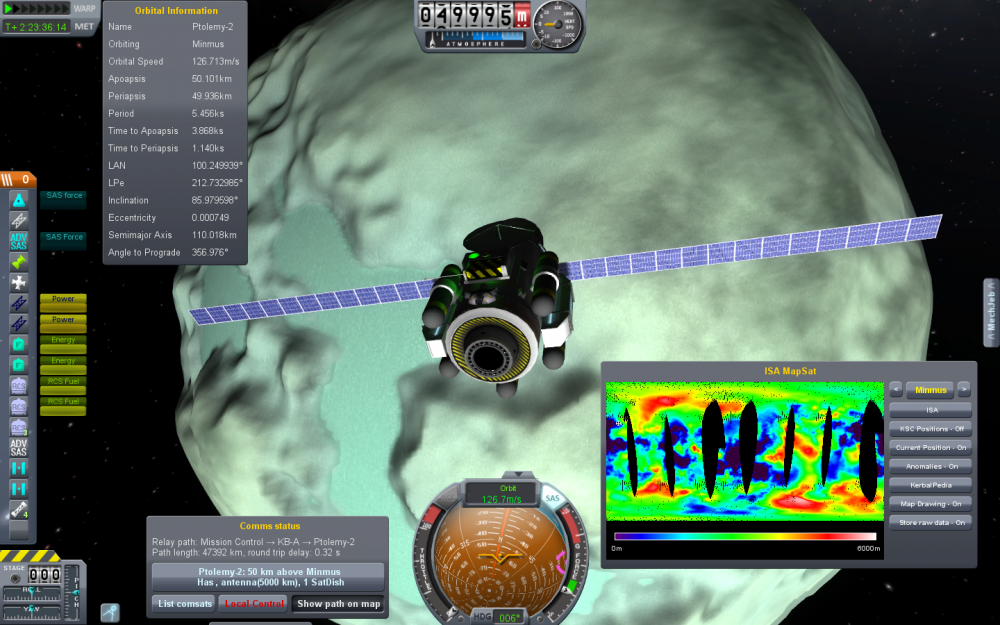
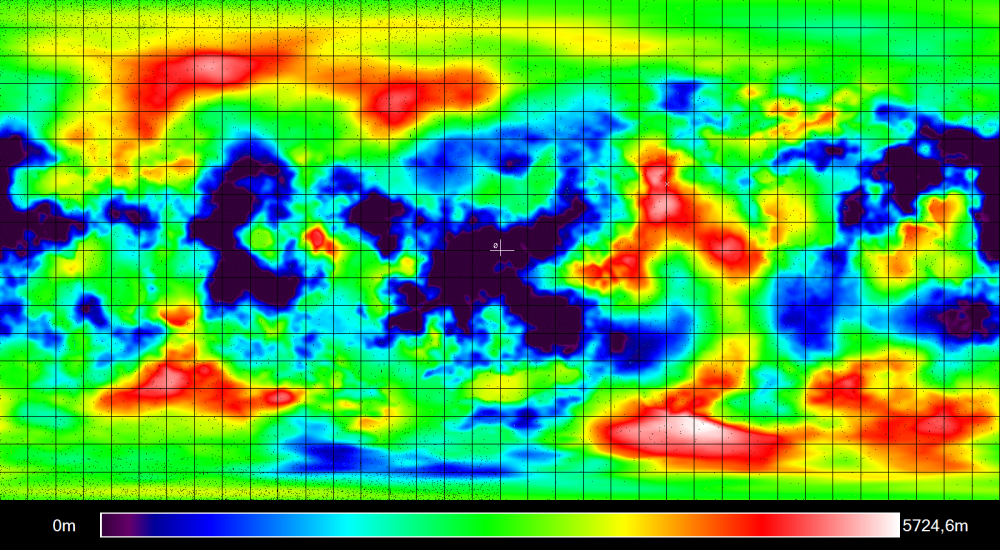
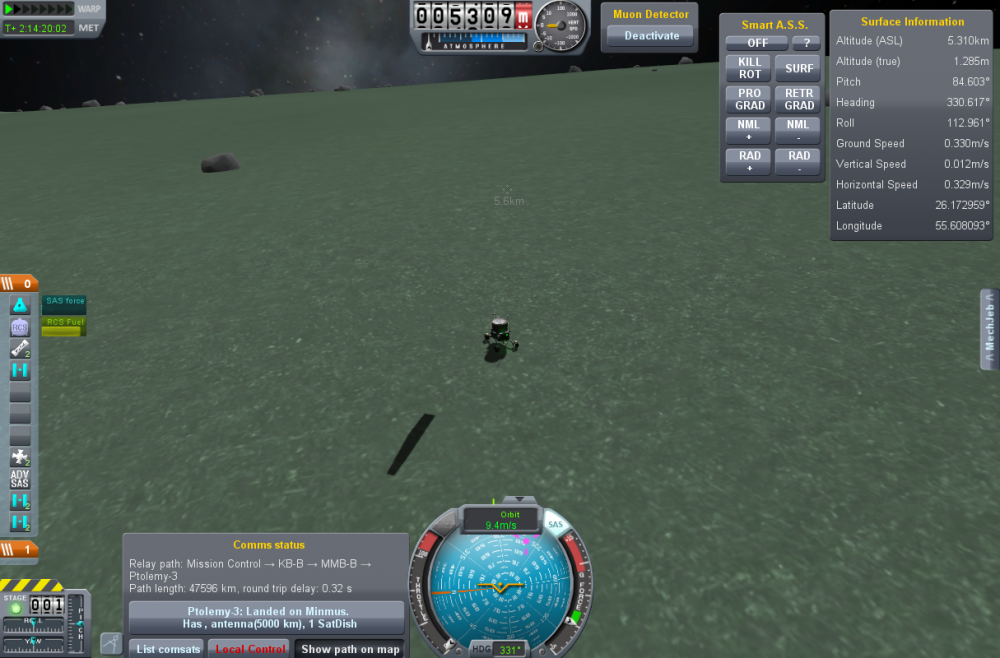
Доставленный на низкую орбиту картографический модуль сделал топографическую карту луны и обнаружил нечто. Давайте посмотрим фотографии. Дополнительная информация и комментарии в подписях к ним.
Продолжение следует…
Для картографирования и разведки Лок спроектировал типовой корабль «Птолемей». Ракета-носитель была универсальной, а начинку головной части меняли в зависимости от задач. В процессе выполнения этой фазы в космос отправились три модификации «Птолемея». В разгонном блоке по-прежнему использовали атомный двигатель, как наиболее экономичный. Благодаря отсутствию космонавтов и необходимости везти с собой системы жизнеобеспечения, корабль получился лёгким. Разгон для перелёта к Минмусу с низкой орбиты на одном атомном двигателе занимал около трёх минут.
Вместо того, чтобы оставлять разгонные блоки на орбите Минмуса после перелёта, их использовали для получения дополнительной информации о луне. Аналогично реальному проекту Deep Impact, их сбросили на поверхность Минмуса, чтобы вызвать массивные выбросы снега и льда, и удалённо проанализировать их (можно же немного поролеплеить, в самом деле?).
Доставленный на низкую орбиту картографический модуль сделал топографическую карту луны и обнаружил нечто. Давайте посмотрим фотографии. Дополнительная информация и комментарии в подписях к ним.
Продолжение следует…








17 комментариев
* — художественный оборот речи.
сериистатьи :-)Откровенно говоря, до первой истории из цикла я не обновлял KSP уже очень давно, с 0.13-й версии. А теперь вот такой внезапный всплеск интереса :)
И еще один момент, который я не понял: в вашей версии на ракету можно ставить несколько управляющих модулей, или этот эффект достигается за робопилотов?
По поводу управляющих модулей вопрос не понял, попробуй сформулировать как-то иначе.
А вот по поводу командных модулей… Мы используем мод Remote Tech, в который входят радиоуправляемые командные модули, которых тоже можно цеплять в неограниченном количестве. В итоге, я составил мод пак для экспедиции таким образом, что бы все беспилотные модули работали через Remote Tech, со всеми вытекающими отсюда последствиями. Вот тут можно посмотреть подробней на наш модпак.
Что касается первого, то мне с наскока нанести пользу пользу с его помощью не удалось.
С одной стороны, я ожидал увидеть несколько иной инструмент — ввод скриптов полета и все такое. Есть внушающий надежды инструмент Autom8, но по нему нет документации.
С другой, mechjeb обладает типичным недостатоком asas — маленьким torque. Чтобы было понятно, о чем я: если сравнивать с пилотом, то asas «не дотягивает ручку на себя». Там, где игрок просто зажмет «S» и поднимет нос, у asas он уткнется в землю. Т.е. она способна удерживать курс в гараздо меньшем диапазоне отклонений, чем человек. Для самолетов и ракет с нетривиальной схемой вывода это может оказаться (и оказывается) критичным.
Сразу скажу, что основной фокус MechJeb, как и KSP, в космических полетах, а не в атмосферных, поэтому о данной области мне особо сказать нечего. Единственный мой самолетный перелет прошел на ручном управлении, т.к. Smart ASS SURF режим ручного ввода наклона и курса не мог удержать нос самолета стабильно. На этом мой опыт атмосферных полетов с MechJeb закончился.
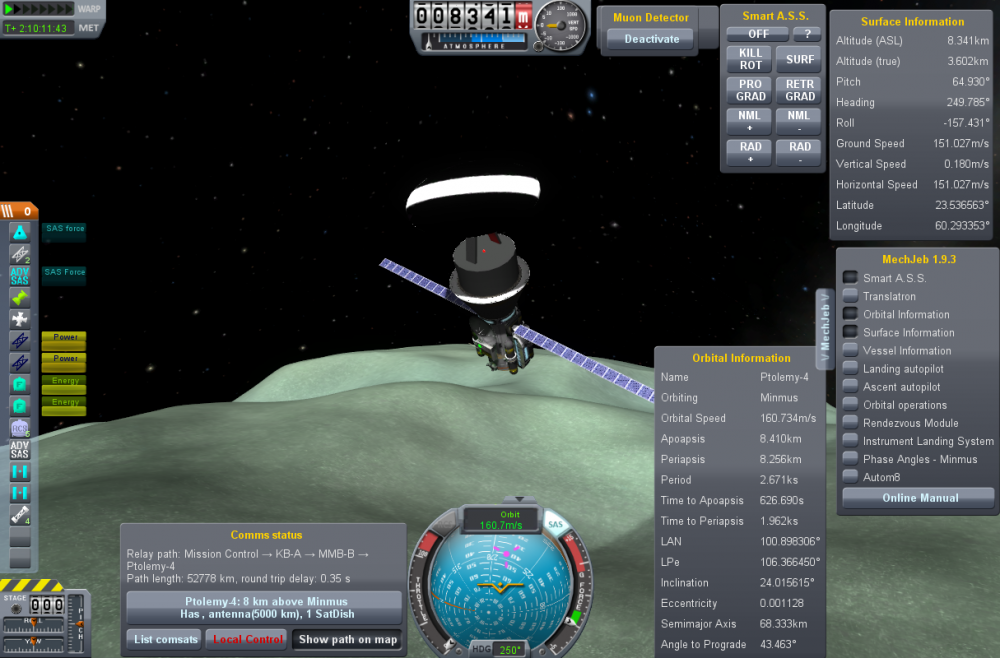
А теперь касательно пользы. MechJeb, в самую первую очередь, важен как инструмент телеметрии. Закладки Surface/Orbital Information и Randezvous Module дают кучу важных цифр, которые лично мне нужны как воздух, потому что я ненавижу летать «на глаз» в стоковой игре.
Второй полезный момент — Smart ASS, с возможностью автоматически держать корабль повернутым в нужном направлении, «работая» только тягой двигателя. Я летаю уже много лет летаю в авиасимы, и привык к стабилизации полета в определенных рамках. Тем более, когда уже далеко не первую тысячу раз разворачиваешь вручную корабль в прогрейд/ретрогрейд — банально надоедает. Можно теперь и автоматике передать это дело. Не говоря о том, что IRL космонавты всегда используют автопилоты, а управление вручную оставляют для внештатных ситуаций и тренировок).
Третий полезный момент — закладка Vessel Information. В версии MJ 1.9.3 (для 0.17, в которой мы ведем экспедицию) дает только базовую инфу по кораблю (Total mass, Total thrust, Surface TWR, Current TWR), а в 1.9.4 (для 0.17.1) — более детально, да еще и по каждой ступени. Опять же, делать вручную это я уже давно научился, но дело это длительное, неудобное и утомительное. Пускай теперь автоматы страдают за меня.
Остальной функционал MechJeb практически не трогаю.
Какая польза от RemoteTech? Тут все просто. Он дает возможность контролировать любой debris, т.е. все, что отделилось от корабля, и имеет на борту специальные модули. А если еще использовать только RT для создания беспилотных кораблей (и, как я говорил ранее, не использовать командные модули MechJeb), то мы получаем более реалистичную систему беспилотных систем, где спутники связи имеют реальную цену и функционал. На этом все %)
Зато если корабль более-менее устойчиы, SURF удерживает его достаточно стабильно. Например, он очень помог мне с выводом «шаттла» на высотах более 1к, когда комплекс с одной стороны, приобретает курсовую устойчивость, а с другой — чувствительнее реагирует на малейшие действия рулем. Т.е. там, где уже нет нужды «жать до упора», но нужна постоянная коррекция и есть хорошие шансы потерять корабль из-за слишком резких действий рулем. В этом случае остается только работать автоматом тяги и сбрасывать отработанные ступени.
Это уже намного меньше телодвижений, чем в полностью ручном режиме.
Т.е. для моих целей (роботизированный вывод объекта по заданной не тривиальной программе вывода) этот инструмент пока слабоват. Ну, по крайней мере был повод покопаться в Lua