В KSP 0.18 появился долгожданный инструмент для облегчения космических полётов — орбитальный планировщик. Он позволяет прокладывать желаемую траекторию и даёт подсказки для перехода на неё. Планировщик не является автопилотом — управление ориентацией и двигателями корабля по-прежнему ложится на игрока.
Основы орбитальной механики достаточно подробно освещены ранее (орбиты, манёвры), так что я не стану на них останавливаться.

На карте (M) космические аппараты отображаются различными значками, в зависимости от типа. Значок можно сменить вместе с названием при переименовании — эта опция доступна при правом клике на командном модуле.
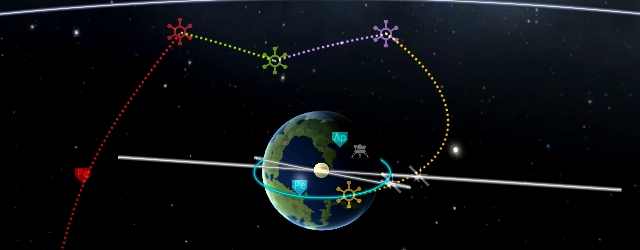
Эллипс орбиты активного в данный момент космолёта отрисовывается голубым цветом, а всех остальных — серым. Клик на любом месте орбитальной траектории создаёт точку запланированного манёвра и вызывает координатный «румб». На нём отмечены три основные оси, с помощью которых можно задать непосредственно манёвр. Ось движения отмечена жёлтыми маркерами, ось нормали — пурпурными, а радиальная ось — синими.
Потянув за маркеры осей, мы задаём изменение скорости вдоль неё по импульсной модели. При этом пунктирной линией рисуется получающаяся после манёвра орбита. Поэкспериментируйте с разными осями и посмотрите, как они влияют на конечный результат. Потянув «цветок» мышкой, можно перемещать его по орбите.
 Левый клик сворачивает румб в звёздочку-снежинку, отмечающую место запланированного манёвра. Её можно развернуть обратно для дальнейших коррекций. Правый клик сворачивает цветок осей в значок с закрывающим крестиком, и запланированный манёвр можно отменить. Не забывайте удалять пройденные манёвры, поскольку автоотмены пока не предусмотрено.
Левый клик сворачивает румб в звёздочку-снежинку, отмечающую место запланированного манёвра. Её можно развернуть обратно для дальнейших коррекций. Правый клик сворачивает цветок осей в значок с закрывающим крестиком, и запланированный манёвр можно отменить. Не забывайте удалять пройденные манёвры, поскольку автоотмены пока не предусмотрено. Когда манёвр задан, в полётном интерфейсе NavBall'а появляются новые элементы. Шкала ΔV показывает, какое абсолютное изменение скорости нужно сообщить космическому аппарату для перехода на новую траекторию. Тёмно-синий, отдалённо напоминающий прицел Хищника, маркер курсовертикали отмечает направление, в котором должен быть сориентирован космолёт в момент импульса. Node in T отображает время, оставшееся до прохождения кораблём точки запланированного манёвра, а Est. Burn — приблизительное время работы двигателя, необходимое для достижения нужной дельты-V.

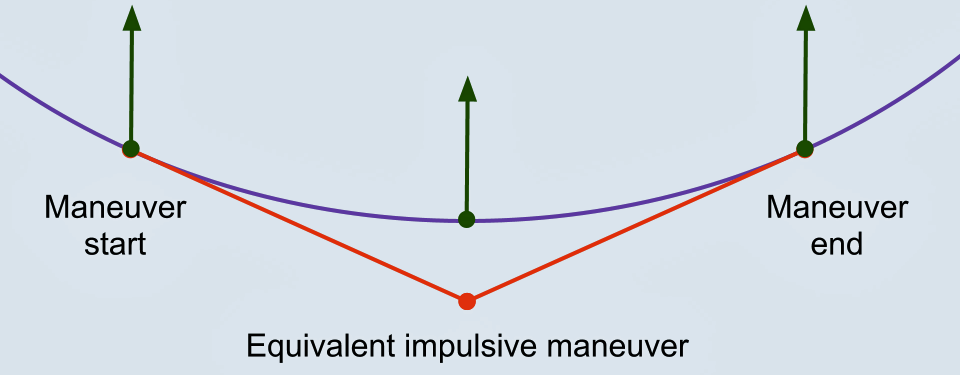
Ранее мы обсуждали, что модель импульсного манёвра, которая используется для расчётов KSP, подразумевает мгновенное изменение скорости. В реальности, даже игровой, это недостижимо. Поэтому нужно постараться провести зажигание двигателей так, чтобы половина его прошла до заданной точки, а половина после. В этом случае погрешность будет минимальна.
Когда нужно совершить встречу в космосе, на помощь приходят дополнительные элементы планировщика орбит. Любой объект можно назначить целью, кликнув на него левой кнопкой. После этого орбита цели окрасится в салатовый цвет, а на нашей орбите появятся маркеры узлов и сближений.
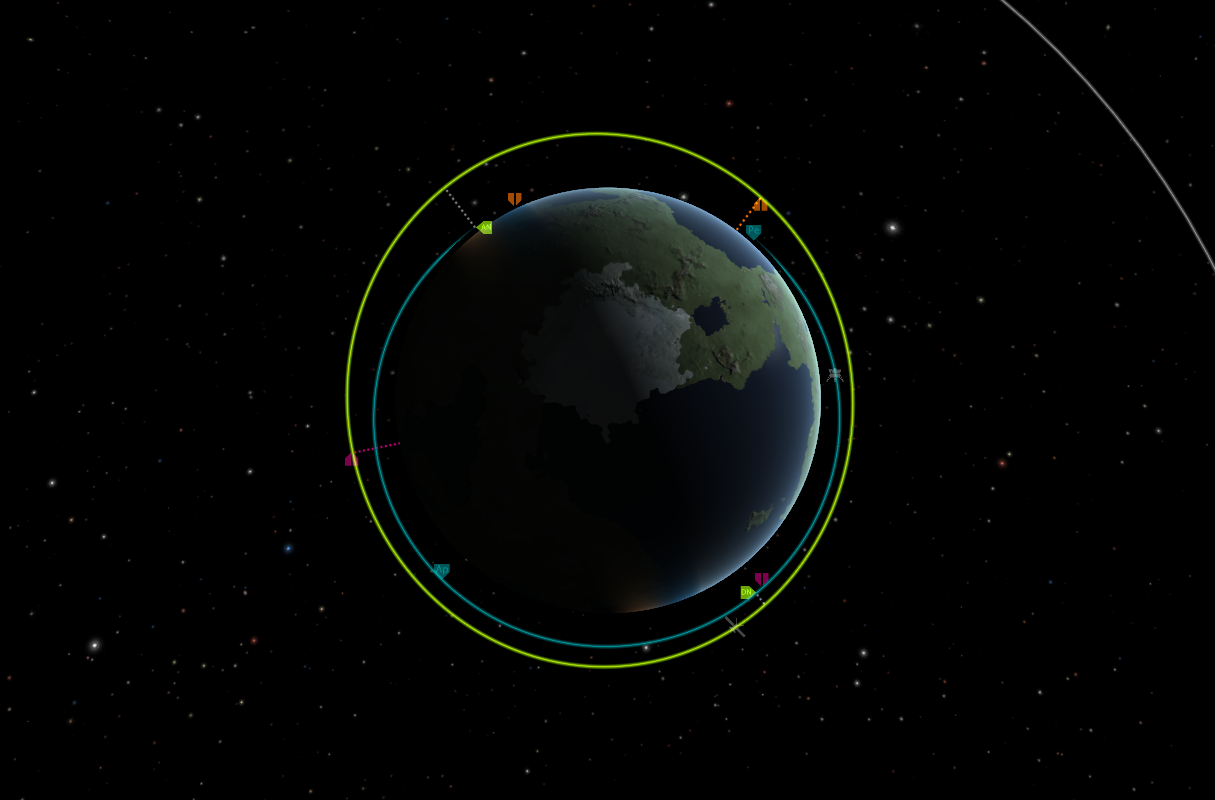
Маркеры AN и DN отмечают узлы — точки пересечения нашей орбиты с плоскостью орбиты цели. При наведении курсора на узел можно увидеть величину взаимного наклона орбит. Для успешного рандеву плоскости должны совпадать, то есть иметь наклонение около 0° относительно друг друга. Для изменения наклона нужно при прохождении одного из узлов направить импульс по нормали к плоскости орбиты в ту или другую сторону в зависимости от узла. Поэкспериментируйте.
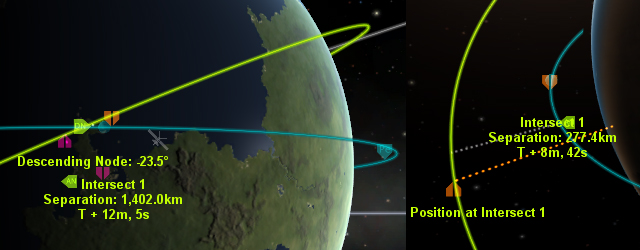
Места, где два корабля находятся на минимальном расстоянии друг от друга, на карте отмечены маркерами Intersection 1 и 2. Обычно точек максимального сближения две, соответственно маркеров — четыре. В каждой паре один из маркеров показывает положение нашего корабля, а второй — проекцию положения цели на нашу орбиту. При наведении курсора высвечивается минимальное расстояние между кораблями, когда они пройдут «рядом» друг с другом и оставшееся до сближения время. Я пишу «рядом» в кавычках, потому что максимальным сближением может оказаться и тысяча километров.

Для встречи на орбите нужно с помощью планирования манёвров добиться сближения на минимально возможное расстояние. Маркеры положения двух кораблей при этом сойдутся, образовав фигуру, напоминающую песочные часы. Обычно, для последующей стыковки, достаточно попасть в пределы 1 км.
Это были основы работы с планировщиком орбит в KSP 0.18. Практическое применение вышеописанного я продемонстрирую в одной из следующих заметок, когда буду рассказывать о сборке МКС. До связи!

{kind=link}
20 комментариев
А как потом догонять (или ожидать) движущееся по той же орбите тело? Поочерёдно разгоняясь / тормозясь, чтобы возвращать орбиту к изначальным параметрам?
При встрече орбиты должны стать полностью идентичны в тот момент, когда корабли близко. «На глаз» планировщиком проще всего сделать так, что орбиты сначала «соприкоснулись» на каком-то участке. После этого в области соприкосновения провести следующий маневр, чтобы отстать или опередить цель на нужное расстояние за следующий виток (чтобы отстать, твоя орбита должна стать больше, чем у цели, чтобы опередить — меньше). Следи за маркерами интерсекций и максимально сведи их. Следующий маневр проводится в момент встречи, чтобы максимально сравнять свою орбиту с орбитой цели.
А стыковка требует одинаковых орбит? Или там такие промежутки времени, что можно в узле успеть всё сделать? И как меняются орбиты состыкованных модулей, если они не были изначально одинаковыми?
(это, наверное, и будет в следующей статье? :))
Если ты подошёл к цели на расстояние, скажем, 5 километров, то уже можно пытаться сблизиться без планировщика по приборам (об этом я ещё не писал). Этим мы вчера успешно занимались во время трансляции, (http://twitch.tv/andromolen/b/350811040 примерно с 2:11:00 :))
Автопилот тоже бывает весьма полезен, в первую очередь — для поиска артефактов в конструкции нового корабля, когда еще не известно наверняка, способен ли он в принципе достигнуть орбиты, или потеряет управление и развалится на половине пути.
Будем откровенны — даже Олдрин и Армстронг использовали автопилот при посадке на Луну, да и Сатурн 5 управлялся отнюдь не вручную. И это — на первом компе с интегральными микросхемами.
Но регулярное использование таких примочек в значительной степени обедняет игру. Особенно это касается стыковки, которая была добавлена лишь в последнем обновлении и по определению еще не должна была стать так же банальна, как вывод на орбиту. Рандеву двух аппаратов на орбите может быть проблематично, но с новым планировщиком это лишь вопрос сноровки и запасов горючего.
Если то, что вы планируете собрать на орбите, использует больше стыковок, чем вы в состоянии произвести (даже используя сейвы) — может, это повод упростить конструкцию? Тем более, что стыковочные соединения имеют низкую прочность (без модов) и позволяют пристыкованным фрагментам очень сильно «гулять».
Сборка больших кораблей на орбите — это тоже наши придумали. Для этого-то в общем автоматика стыковки и была придумана.
Но всё равно я лично предпочитаю в КСП ручное управление. При том, что я скорее инженер, чем пилот (а с самолётами у меня вообще не ладится — вот от автопилота для них я бы не отказался)
хреновастойпроблемной, а в штатах — цифровой и вообще лучше.Позволю себе процитировать недавно прочтенную байку о полете Бурана (который тоже был, да-да, автоматическим):
А вот цифра… а была ли цифра тех времён в условиях космоса вообще достаточно надёжна? Всё-таки какой-нибудь шальной электрон может и программу сбить, если экранирование недостаточное. С аналоговыми схемами наши точно дружили куда лучше.
Кстати, читал где-то такое про бортовой компьютер на последней Н1 (тогда наши впервые поставили цифру на космический аппарат). При подготовке к пуску на одном из двух компьютеров (один стоял на третьей ступени, второй на орбитальном корабле, аппаратура была на них была идентичная) было обнаружено, что медь позеленела. Пришлось разбираться с этим делом и заказывать новый доработанный бортовой компьютер. Между прочим, эта ракета запускалась с заложенным профилем выполнения всей миссии в автоматическом режиме. При том, что из аппаратуры кораблей много чего в космос летело впервые
Испытания в СССР всегда проводились в полной комплектации с полным профилем миссии. Даже если до орбиты дотягивали с пятого раза.
Я сейчас имею в виду известные факты: Королев не сошелся с КБ Глушкова, которое делало мощнейшие на тот момент (да и сейчас, Протон тому подтверждение) ракетные двигатели, пусть и работающие на гептиле, зато выдававшие необходимую мощность. Но Королев хотел керосин на атмосферных ступенях и кислород-водород на космической, как у Сатурна. Хотя ресурсов для этого не было никаких. Из-за этого пришлось ориентироваться на маломощные двигатели другого КБ, которые пришлось ставить на ракету дюжинами, и которые радостно трясли ракетой и отказывали в произвольные моменты времени. В добавок, из соображения экономии, испытаний изделия в сборе никто не проводил — попробуй испытай махину, в которой тридцать с лишним двигателей только в первой ступени.
Очевидно же, что если в ракете 5-6 мощных двигателей, то в них меньше частей, чем в 30-ти, и значит надежность будет в целом выше. В результате, личный авторитет Королева похоронил достаточно перспективный проект ур700, уже имевший двигатель. Который, в отличие от Н1, вполне мог бы дать необходимый для лунной программы носитель в разумные сроки.
А вот когда корабли уже на расстоянии сотни метров и взаимная скорость близка к нулю — это лишь вопрос ловкости рук, терпения и наличия RCS в правильных местах.
Кстати о правильных местах, новый стыковочный режим меня не впечатлил (ну или я не научился им пользоваться). Стыковки я делал в классике, она дает больше контроля, а управляемость — наше все. Тем более, что стыковочный режим «игнорирует» двигатели, расположенные не на осях, а я этим грешу.