
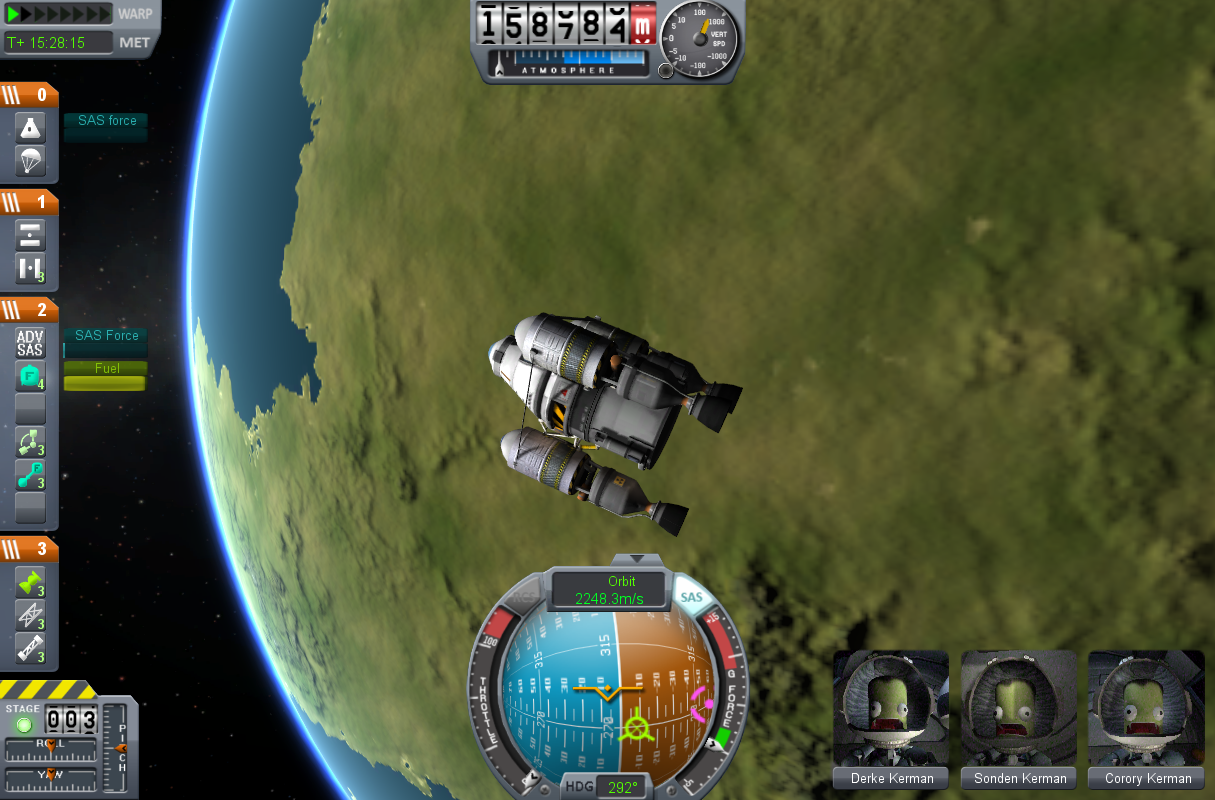
В прошлый раз мне не хватило места, чтобы рассказать про главную деталь полётного интерфейса KSP, и теперь я это исправлю. Основной навигационный элемент расположен в нижней части экрана. Эта штука по-английски называется attitude and heading reference system, по-русски — курсовертикаль, а в KSP-сообществе прижилось слово NavBall. Кнопка со стрелочкой на верхней кромке позволяет свернуть или развернуть его.
Этот прибор зародился на кораблях в виде двумерного диска, связанного с компасом для отображения курса. Потом перешёл на самолёты и обзавёлся третьим измерением, отражающим наклон относительно горизонта. В таком виде он перекочевал и на космические аппараты.
Подразумевается, что мы смотрим изнутри на сферу, изображающую наше поле зрения с разметкой сторон света и горизонта. Галочка с точкой по центру — наш корабль, вид сзади. Он находится в центре сферы, которая может свободно вращаться вокруг него.

Сфера состоит из двух разноцветных половинок, и линия, разделяющая их — это линия горизонта. Если мы смотрим на коричневую полусферу, значит нос нашего аппарата направлен куда-то в землю, а если на голубую — в небо. На линию горизонта наложена шкала курса, по которой определяется направление движения. За ноль принято направление на северный полюс, и от него отложены деления по 45 градусов. Точное значение курса высвечивается на маленьком нижнем табло HDG (Heading).
По вертикали идёт шкала «наклона» от 90 до -90 градусов с делениями по 10. 90 градусов это зенит, смотрим вертикально вверх от поверхности, -90 — вертикально вниз.

Самое интересное на NavBall’е — это отображение вектора скорости нашего корабля. Жёлтый кружок показывает, куда мы летим. В случае самолёта туда обычно смотрит его нос, но на орбите и в нештатных ситуациях направление «взгляда» и движения зачастую не совпадают. Такой же жёлтый кружок, но перечёркнутый, показывает направление точно противоположное движению. Наконец, лиловые метки отмечают путь к запасному космодрому или противоположный ему.
Сверху от шарика находится табло линейной скорости. Слева — шкала, отображающая тягу двигателей. Тяга по умолчанию регулируется клавишами Shift и Ctrl. Шкала справа показывает перегрузки (то есть ускорение), испытываемые кораблём и космонавтами. Эта деталь пока что чисто косметическая, и не оказывает никакого влияния на игру, но когда-нибудь нам нужно будет заботиться и о благополучии пилотов.
Индикаторы RCS и SAS дают понять, включены ли соответствующие системы. SAS занимается автобалансировкой аппарата в заданном направлении (успех зависит от правильно подобранных в конструкции элементов управления), а RCS — это система маневровых двигателей для тонких орбитальных маневров (двигатели и топливо к ним нужно также предусмотреть заранее).
Для начинающего пилота важно как можно быстрее осознать, что ориентировку аппарата относительно поверхности удобнее осуществлять по-разному в разных режимах полёта. На низких высотах, пока мы летаем как самолёты, всё просто. Горизонт горизонтален, можно ориентироваться по сторонам света и чувствовать себя комфортно. Любой, кто хоть немного летал в любом авиасимуляторе, справляется легко. В космосе на орбите всё иначе.

На большой высоте реальный горизонт планеты и горизонт NavBall’а перестают совпадать. Планета может быть где-то так далеко, что её можно полностью окинуть взглядом, а горизонт NavBall’а будет показывать куда-то в космос (по касательной к сфере данного радиуса с центром в центре планеты, на самом деле). Ориентироваться при этом становится неудобно. Что же делать?
На орбите нам нужен новый “горизонт” и поверхность, относительно которой мы будем ориентироваться. Эта поверхность — плоскость орбиты корабля. Существует режим камеры, так и называющийся “Orbital”, в котором она принимает за горизонт плоскость орбиты. Режимы камеры переключаются клавишей V.
При таком подходе шкалы NavBall’а меняют своё первоначальное значение. В случае орбит, близких к экваториальным, шкала курса и горизонт NavBall’а будут почти вертикальной линией. Шкала тангажа с делениями по 10 градусов станет близка к горизонтальной. В таком режиме ориентироваться гораздо удобнее.
Конечно, чтобы прочувствовать это как следует, нужно всё ощутить на практике. Поэтому не бойтесь экспериментировать и получите бесценный личный опыт. Удачных полётов!
Продолжение следует…

7 комментариев
Есть к вам вопрос, как к команде, пользующейся модами: нужен инструмент, который позволял бы (программа-минимум) расчитывать просчитывать миграцию центра масс в динамике, т.е. по мере исчерпания топлива. Помимо этого, желательно было бы учитывать изменение вектора тяги в зависимости от высоты, а так же аналогичное влияние подъемной силы крыльев. Если вы с чем-то подобным сталкивались, то реквестирую ссылочку :)
Зачем это нужно: последних несколько вечеров я разрабатываю модель американской системы Space Shuttle.
Т.е. с одной стороны, похожую внешне (самолет верхом на огромном баке и два бустера по бокам), с другой — по техническим аспектам (превосходство бустеров по тяге, одновременная работа всех двигателей, питание двигателей ракетоплана от внешнего бака, отстыковка бустеров, полет с баком, отстыковка бака, посадка по самолетному типу в режиме планирования).
Так вот, для меня основной пока не разрешенной проблемой является нестабильность конструкции на этапе вывода. Поясню: на 8к конструкция заваливается в направлении хвоста, и начинает бешено вращаться. И победить это мне пока не удалось. Соответственно, этим ограничен и «лучший результат» — скромные 30к.
Идея помешать смещению центра тяжести за счет «связного бака» (в котором топливо уходило бы равномерно из всех баков, а не по очереди) провалилась, т.к. механизм работы шлангов изменили, перекачка больше не работает.
Добавление RCS-движков для стабилизации не помогает?
Что если попробовать уравновесить конструкцию большим (или небольшим) баком зеркально шаттлу, топливо из которого будет браться в последнюю очередь (ток топлива можно отключить в правокнопочном меню на старте)?
Про моды — MechJeb умеет делать вывод на орбиту в полуавтоматическом режиме, тонко управляя наклоном корабля на разной высоте. Возможно он справится с выводом? Причём, использование автопилота совсем не заменяет мозг, потому что подходящую кривую вывода и нужные высоты нужно ещё подобрать.
Ответить на вопрос про отображение центров масс в динамике, увы, не могу.
Что меня удивляет больше всего — на уровне моря кораблик пытается клюнуть носом в землю, причем достаточно существенно. Но, стоит набрать 8к и начать использовать нижний бак — ситуация меняется на противоположную.
Т.е. очевидно, что пока центр масс приходится на огромные рокмановские танки и движки толкают прямо под них, то двигатели шатла, расположенные чуть в стороне от центра тяжести (что, кстати, конструктор нифига не показывает) и lift от крыльев укладывают конструкцию вперед. Но, когда горючка в больших баках подходит к концу, центр тяжести смещается с осевой бустеров куда-то вниз и в сторону хвоста, в тоже время lift от крыльев ослабевает, а пять радиальных движков со своим суммарным 600 thrust оказываются не в состоянии удерживать 3к тяги от «Mainsail». При отстыковке бустеров вообще начинает твориться страшное, центр тяжести резко смещается вниз и кораблик превращается в волчок.
Если бы можно было регулировать тягу двигателей отдельно и плавно, такой фигни можно было бы избежать. Например, установить часть двигателей под углом к осевой, и на поздних этапах увеличивать их тягу, чтобы «поймать» «убегающий» центр тяжести.
Подозреваю, примерно так и делал реальный шаттл, когда оставался уже без бустров, но еще верхом на баке (который в заполненом состоянии в три раза тяжелее самого ракетоплана).
Но увы, KSP для этого пока слишком аркаден.
И не помогут. В атмосфере (8к-30к метров имелось в виду над уровнем моря Кербина, я так понимаю?) от RCS толку ноль, слишком маленькая тяга. Тем более, с учетом того, как автоматика любит лихо расходовать RCS топливо.
Действительно, как сказал Андре, стоит попробовать MechJeb. Если двигатели с управляемой тягой, и конструкция позволяет, то он вполне вероятно сможет поднять корабль из атмосферы.
Что еще раздражает, шасси всегда раскрыты, независимо от того, стартуешь ты со стола или взлетки.